Aquanaut
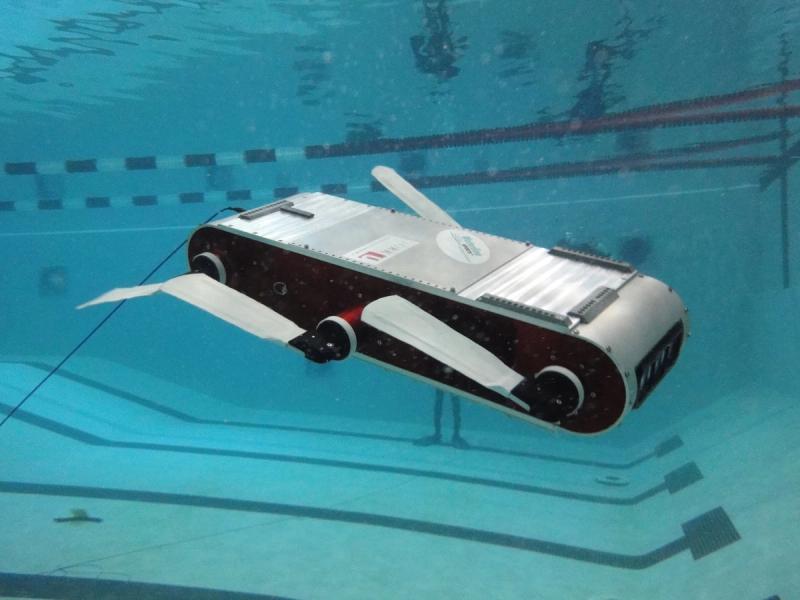
Aquanaut is an unmanned underwater vehicle that can transform itself from a nimble submarine designed for long-distance cruising into a half-humanoid robot capable of carrying out complex manipulation tasks. It can inspect subsea oil and gas infrastructure, operate valves, and use tools.
- Creator
- Year
- 2019
- Country
- United States 🇺🇸
- Categories
- Features

Did you know?
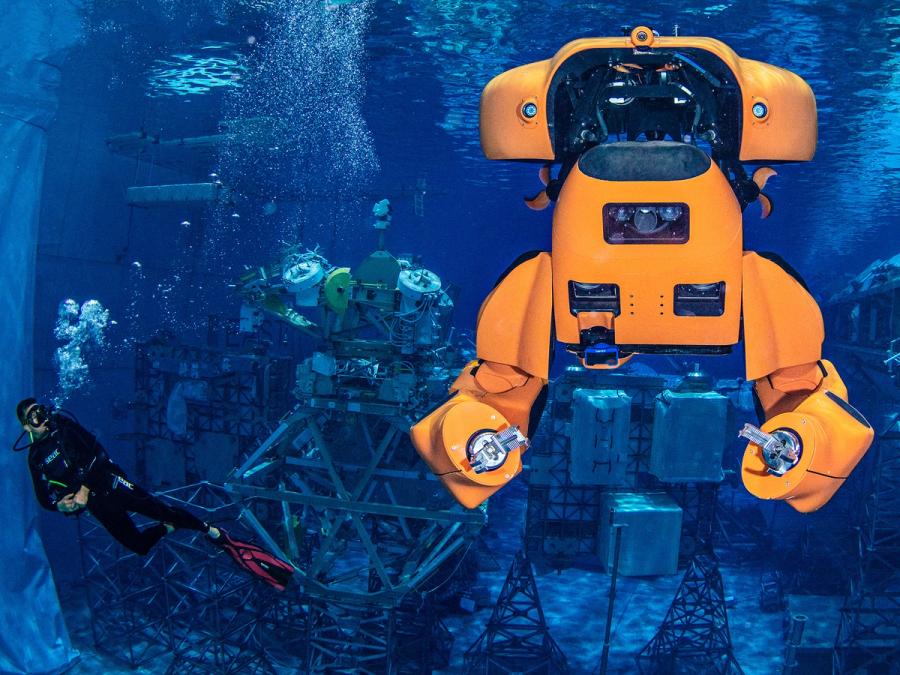
Houston Mechatronics tested Aquanaut in a massive indoor pool that NASA uses to train astronauts for zero-gravity environments.


History
Nauticus Robotics (formerly Houston Mechatronics) was started by former NASA roboticists who worked on advanced technologies used in complex space missions. Founders Matt Ondler, Reg Berka, and Nic Radford want to bring their robotics expertise to industries that include energy, offshore oil and gas, defense, and seabed mining. They have raised more than US $23 million in venture capital since starting Nauticus in 2014. The company, based in Houston, Texas, is developing an all-electric underwater transforming vehicle called Aquanaut. It combines the capabilities of both an underwater autonomous vehicle, or AUV, and a remotely operated underwater vehicle, or ROV. When in AUV mode, it can travel long distances of up to 200 km (108 nautical miles) in one mission while mapping its surroundings and performing structure inspections. In ROV mode, the robot can turn valves, use subsea tools, and perform other manipulation tasks.


Specs
- Overview
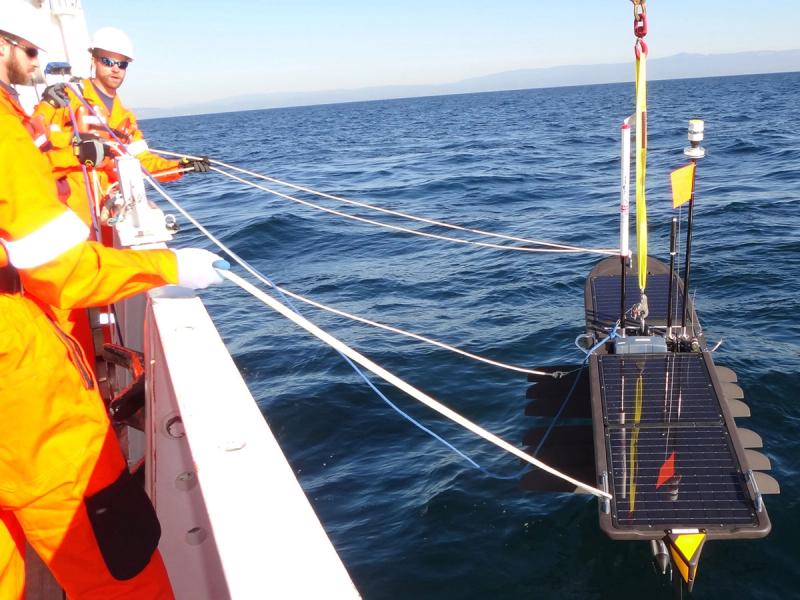
All-electric vehicle, high level of autonomy. Operates completely untethered and does not require support ships as with traditional ROVs. The current version can travel more than 200 kilometers in submarine mode and has a maximum operational depth of 300 meters.
- Status
Ongoing
- Year
2019
- Website
- Width
- 152 cm
- Height
- 97 cm (closed), 160 cm (open)
- Length
- 350 cm
- Weight
- 1050 kg
- Speed
- 13 km/h (7 knots)
- Sensors
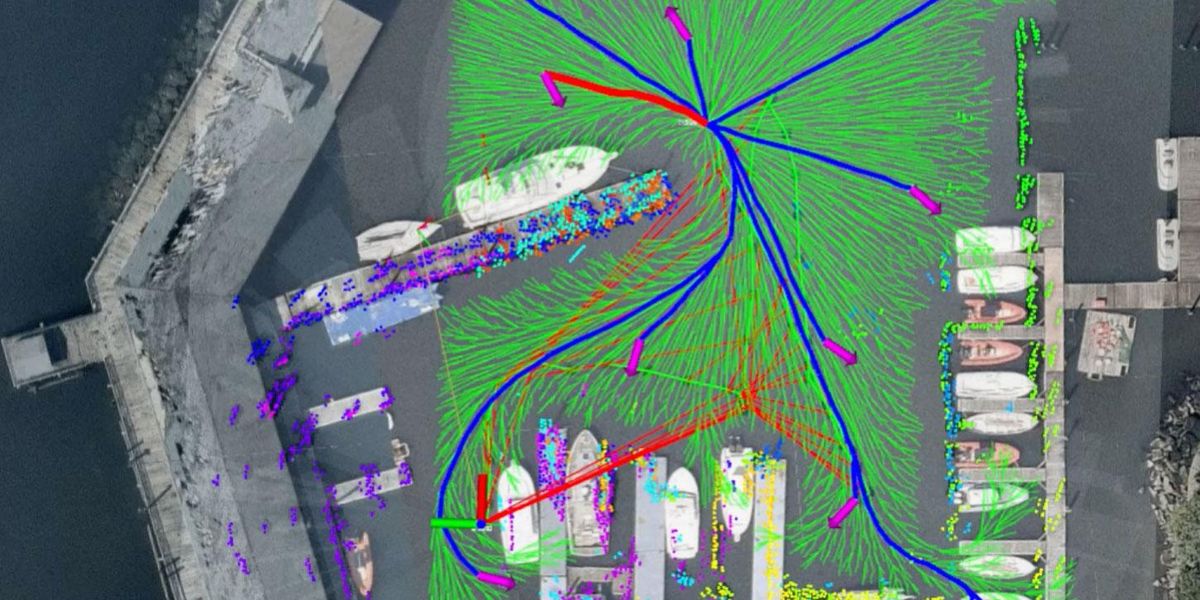
Manipulators with joint absolute position and force and torque sensing at the end-effector. Vehicle body contains an inertial navigation system, Doppler Velocity Logs (DVLs), ultra-short baseline, machine vision cameras, forward-looking sonar, scanning sonars, GPS, and custom 3D structured light.
- Actuators
Electric
- Degrees of Freedom (DoF)
- 26 (Arm: 7 DoF x 2; Arm end-effector: 1 DoF x 2; Propulsion: 7 DoF; Head: 2 DoF; Transformation Mechanism: 1 DoF)
- Materials
Syntactic foam with composite overlay
- Compute
Custom control and computing package
- Software
Custom software built around ROS framework
- Power
Rechargeable lithium-ion