Armar

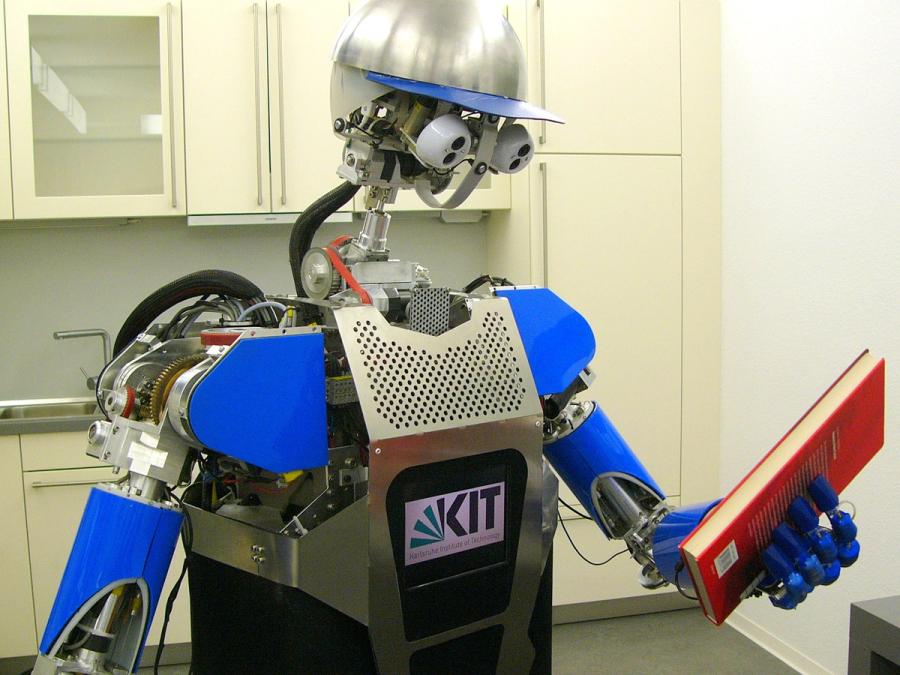
Armar is a robot created to be a helper in industrial environments. Its humanoid form lets it use human tools like power drills and hammers. Earlier versions were home helpers that could clean tables and load the dishwasher.
- Creator
- Year
- 2017
- Country
- Germany 🇩🇪
- Categories
- Features
More videos
Did you know?
ARMAR stands for "Anthropomorphic Multi-Arm Robot."

History
Armar was developed at the Collaborative Research Center on Humanoid Robots, funded by the German Research Foundation. The project focuses on the design and implementation of versatile robots that are able to carry out tasks in human-centered environments, to learn from human observation and interact with humans in a natural way. The first ARMAR robot (ARMAR-1) was built in 2000. ARMAR-2, ARMAR-3a, and ARMAR-3b were presented in 2004, 2006, and 2007, respectively. The projects were led by Professors Rudiger Dillmann and Tamim Asfour at the Karlsruhe Institute for Technology. A design for ARMAR-4, a two-legged, 63 DOF torque-controlled humanoid, was introduced in 2012. The latest member of the ARMAR family is ARMAR-6, a collaborative humanoid robot for industrial environments. It can operate tools like power drills, performing tasks on its own or providing assistance to humans.

Specs
- Overview
Bimanual and mobile manipulation. Learning from human observation. Compliant control and physical human-robot collaboration. Natural-language dialog.
- Status
Ongoing
- Year
2017
- Website
- Width
- 60 cm
- Height
- 240 cm
- Length
- 60 cm
- Weight
- 150 kg
- Speed
- 3.6 km/h
- Sensors
Two stereo vision systems (Roboception rc_visard 160 and two Point Grey Flea 3.0) and an RGB-D sensor. 6D force/torque sensors in the wrists. Sensors in every arm joint: absolute and incremental position sensors, torque sensor, 9-axis IMU. Two laser scanners in the mobile base.
- Actuators
16 brushless high-torque DC motors (RoboDrive) and harmonic drives. Highly integrated custom sensor-actor-controller units for the arms. Two motors in each hand.
- Degrees of Freedom (DoF)
- 27 (Head: 2 DoF; Arm: 8 DoF x 2; Hands: 2 DoF x 2; Torso: 1DoF; Mobile platform: 4 DoF)
- Materials
Aluminum and 3D-printed parts
- Compute
Four high-end PCs with 3.40 GHz Intel Core i7-6700 CPU, 32 GB RAM, 500GB SSD. One GPU GeForce GTX 1080 with 8 GB RAM.
- Software
Ubuntu 14.04 OS. ArmarX (custom software).
- Power
48-V battery, 2 to 3 hours of operation, or 220-V external power supply.
- Cost
- €100,000 to 200,000 (approximate)