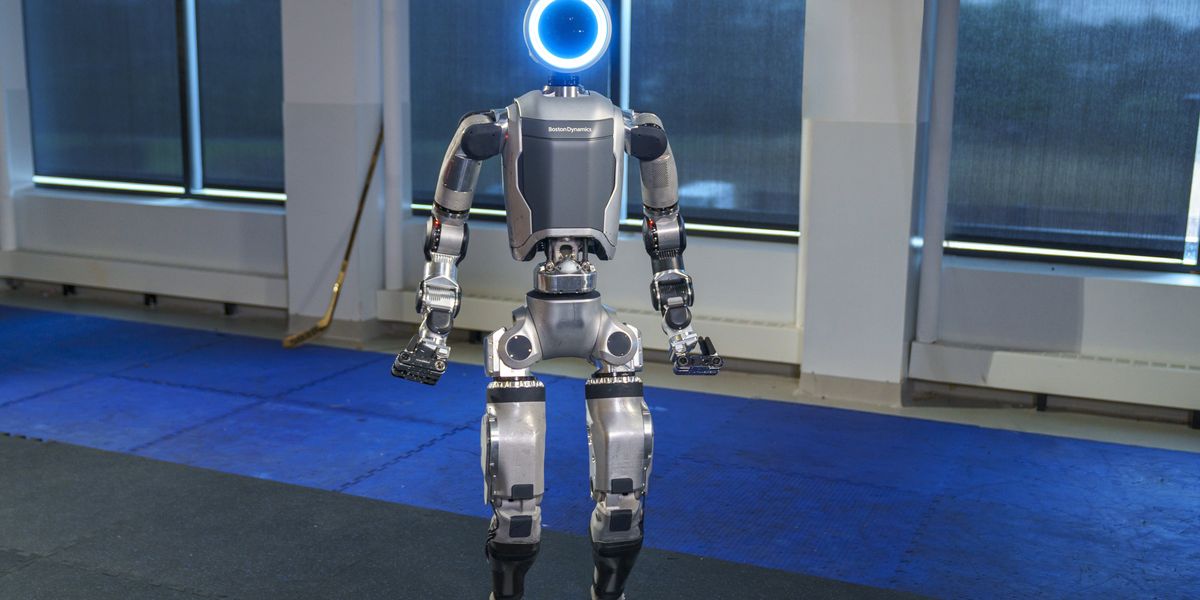
Atlas (2013)
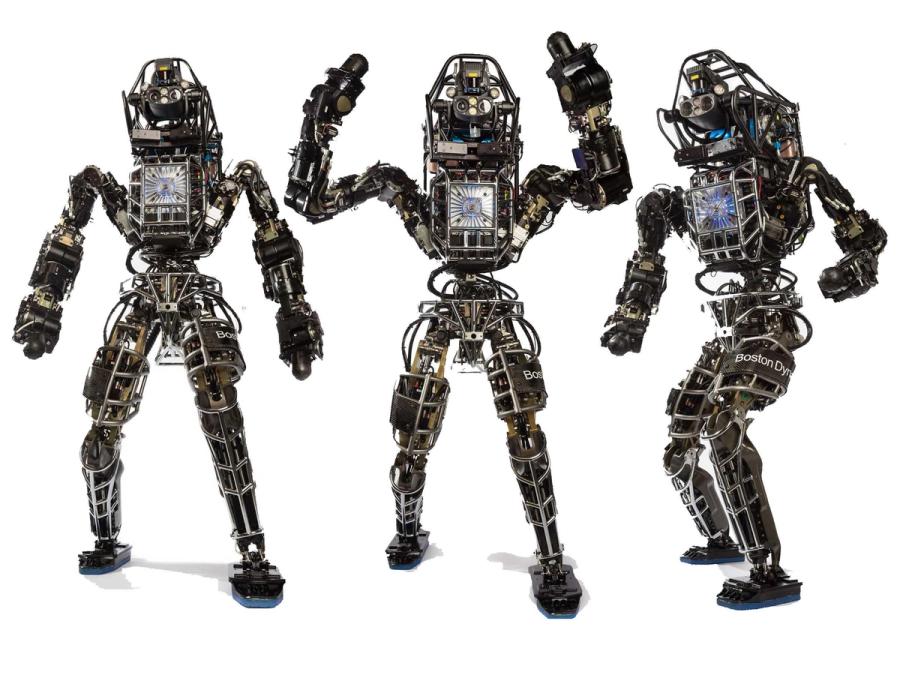
Atlas is a hulking humanoid robot that can walk over rough terrain and manipulate objects. It looks like the Terminator, but it was designed as a rescue robot as part of the DARPA Robotics Challenge.
- Creators
Boston Dynamics and DARPA
- Year
- 2013
- Country
- United States 🇺🇸
- Categories
- Features
More videos
Did you know?
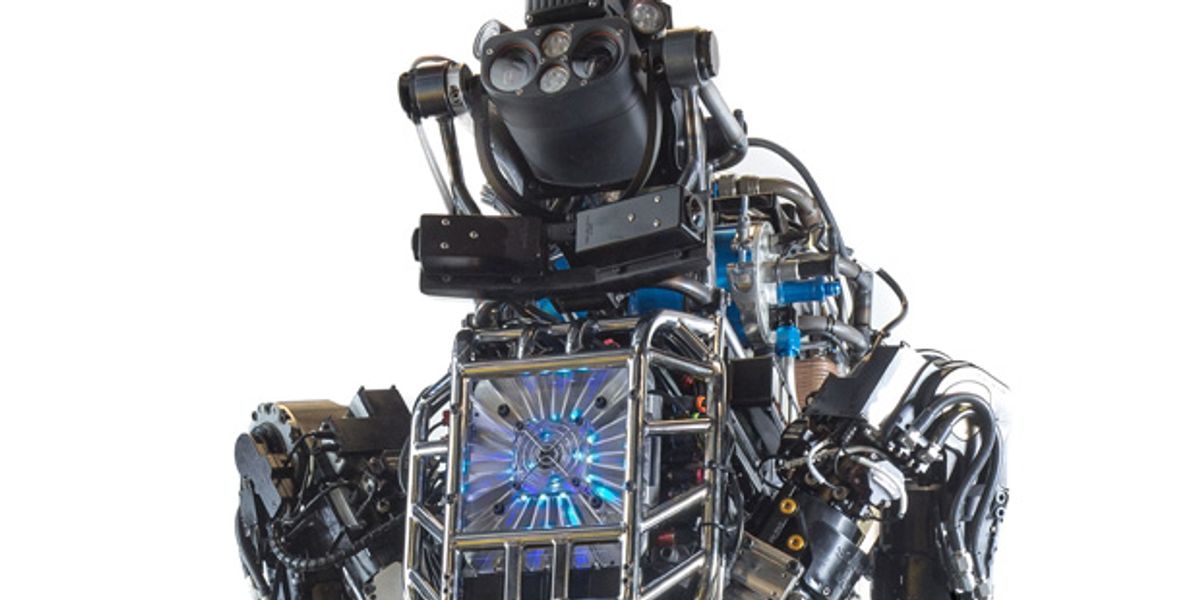
The lights on Atlas's chest look like a flux capacitor, but they're only for decoration.


History
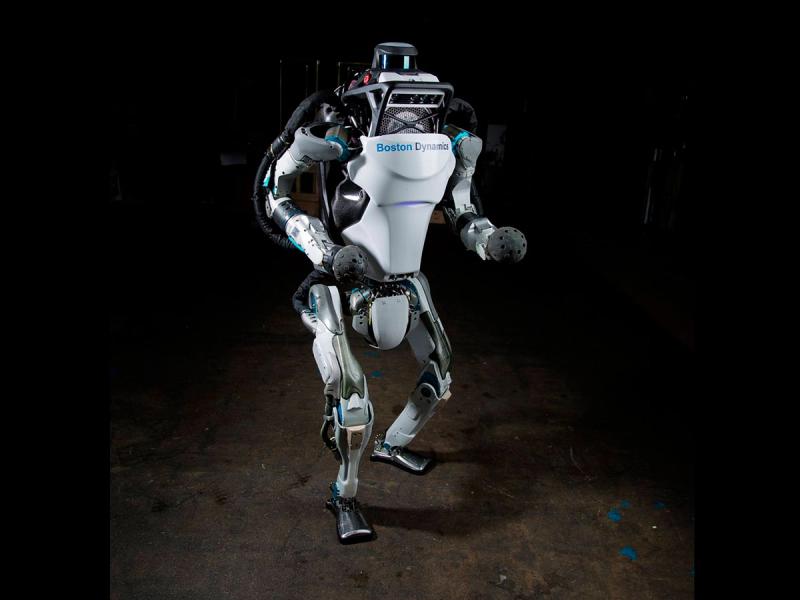
In 2012, the Defense Advanced Research Projects Agency (DARPA) selected the robotics firm Boston Dynamics to build the Atlas humanoid as part of the DARPA Robotics Challenge (DRC). The goal of the DRC was to advance disaster response robotics with the hope that robots, not humans, will one day help mitigate major catastrophes, such as the Fukushima nuclear accident in Japan. The brainchild of then-DARPA program manager Gill Pratt (now a Toyota executive), the DRC held a preliminary competition in December 2013, and the DRC Finals took place in 2015. While some teams built custom robots to compete, other teams used Atlas as a "standard platform" provided by DARPA. Teams had to program their robots to perform a wide range of tasks, including driving a utility vehicle, using power tools, and even breaking through a wall. While Atlas was able to complete many of the challenges, it also stumbled and fell in spectacular fashion.


More Images

Specs
- Overview
Near-human anthropometry. Equipped with hydraulic actuators powered by on-board pump. Body has crash protection coverings.
- Status
Inactive
- Year
2013
- Website
- Width
- 76 cm
- Height
- 188 cm
- Length
- 56 cm
- Weight
- 150 kg
- Sensors
Head: sensor package by Carnegie Robotics with LIDAR, stereo cameras, dedicated electronics, and perception algorithms.
- Actuators
28 hydraulic actuators with closed-loop position and force control. Atlas can use two different pairs of hands, one built by iRobot and the other by Sandia National Labs.
- Degrees of Freedom (DoF)
- 28 (Neck: 1 DoF; Arm: 6 DoF x 2; Torso: 3 DoF; Leg: 6 DoF x2)
- Materials
Aircraft-grade aluminum and titanium
- Compute
On-board real time control computer with 10 Gbps fiber optic Ethernet
- Software
C++ and ROS APIs
- Power
480-V three-phase via tether. On-board hydraulic pump and thermal management.
- Cost
- $2 million