BallIP

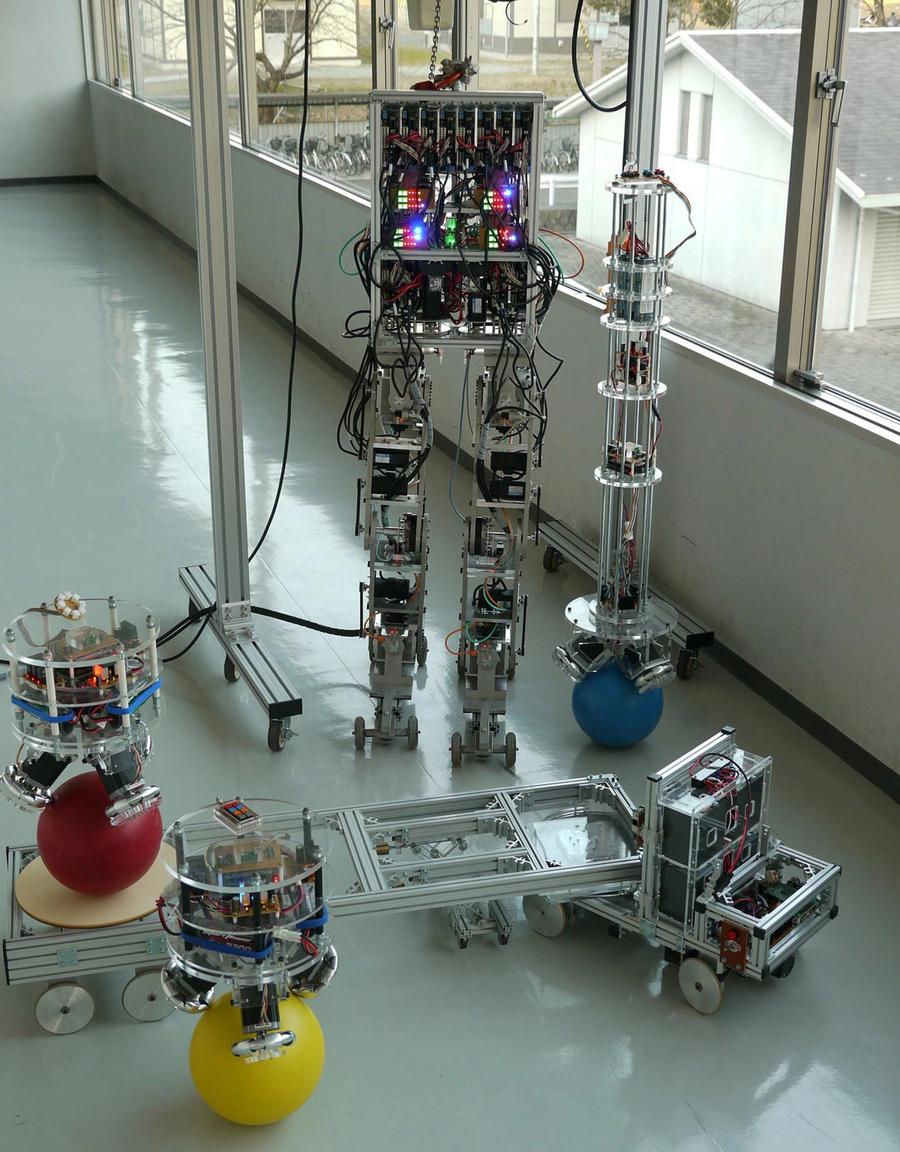
BallIP (short for "ball inverted pendulum") is a robot that balances on a ball. It's designed to explore the feasibility of dynamic balancing systems. More important, it would make a great cocktail waiter.
- Creator
- Year
- 2008
- Country
- Japan 🇯🇵
- Categories
- Features
More videos
Did you know?
The ball the robot rides on is a rubber-coated bowling ball.
History
Masaaki Kumagai, director of the Robot Development Engineering Laboratory at Tohoku Gakuin University, in Tagajo City, Japan, has built wheeled robots, crawling robots, quadruped robots, biped robots, and biped robots on roller skates. Then one day a student suggested they build a robot that would balance on a ball. Dr. Kumagai thought it was a wonderful idea. The robot they built rides on a rubber-coated bowling ball, which is driven by three omnidirectional wheels. The robot can not only stand still but also move in any direction and pivot around its vertical axis. It can work as a mobile tray to transport objects and it can also serve as an omnidirectional supporting platform to help people carry heavy objects. They named the robot BallIP, short for Ball Inverted Pendulum.
Specs
- Overview
Able to support payloads of up to 15 kg (33 lb). Has autonomous and remote-control operation modes.
- Status
Ongoing
- Year
2008
- Website
- Width
- 26 cm
- Height
- 65 cm (including ball)
- Length
- 26 cm
- Weight
- 12.5 kg (including ball)
- Speed
- 3.6 km/h (max)
- Sensors
Attitude sensors, two gyroscopes, two accelerometers.
- Actuators
Three omnidirectional wheels directly coupled to three stepper motors.
- Degrees of Freedom (DoF)
- 3
- Compute
Renesas 16-bit H8/3052 microcontroller
- Software
Control system written in C.
- Power
Three 7.2-V 3000-mAh nickel-metal hydride battery, 1 hour of operation
- Cost
- $1,000 (hardware; design and manufacturing not included)