Bandit

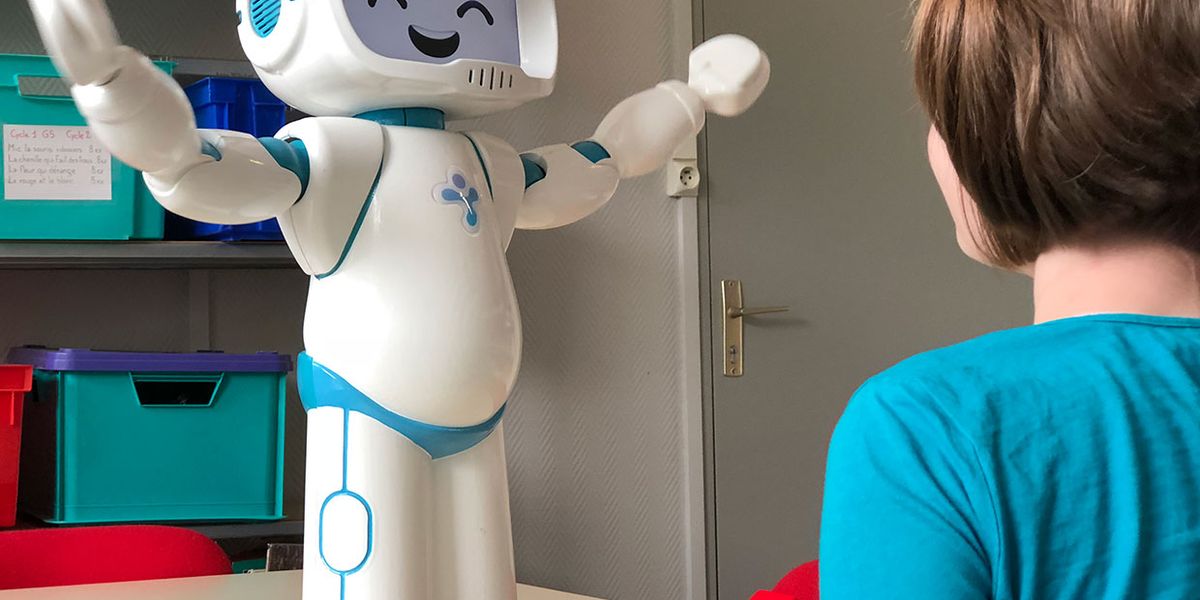
Bandit is a friendly, socially assistive humanoid robot. It's been used to help children with autism, motivate older adults in physical exercise, and provide therapies to stroke patients.
- Creators
- Year
- 2006
- Country
- United States 🇺🇸
- Categories
- Features
More videos
Did you know?
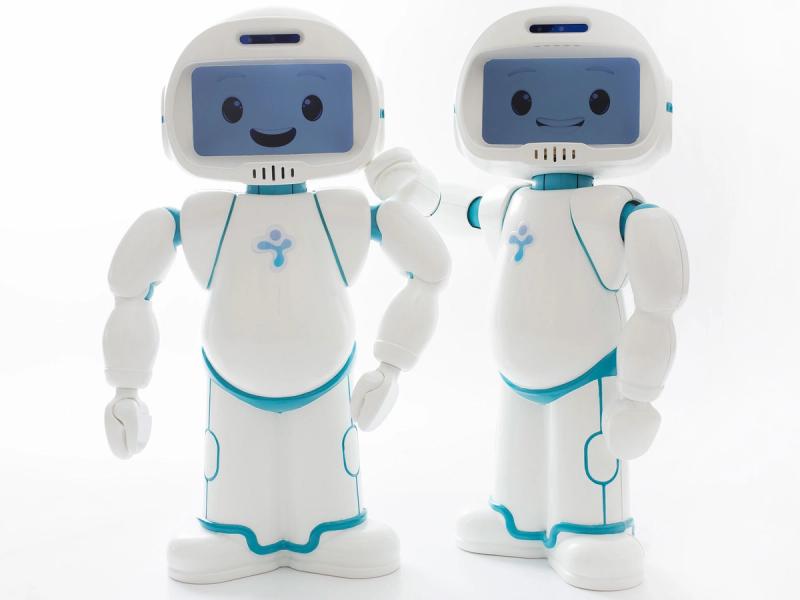
There are six copies of Bandit, named Butch Cassidy, Sundance Kid, Bonnie Parker, Clyde Barrow, Calamity Jane, and Belle Starr.


History
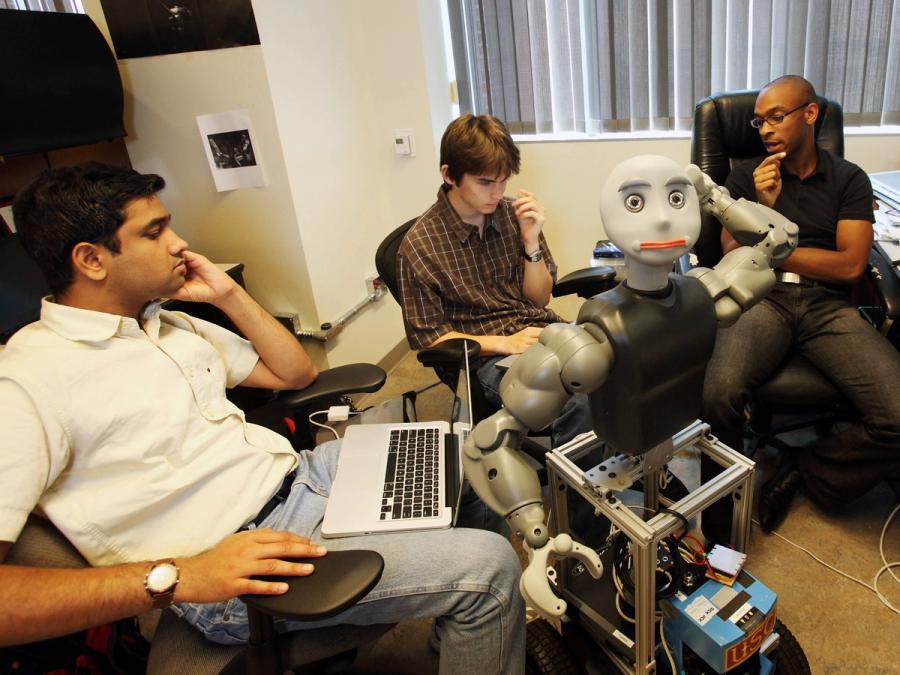
The goal of the Bandit project was developing a humanoid robot for research in socially assistive robotics, including interaction with children and adults in school, home, office, and hospital settings. Led by Maja Mataric, a team at the Interaction Lab at University of Southern California in Los Angeles and BlueSky Robotics designed a robot that is safe, expressive, and affordable. Bandit uses joint friction to hold the arms in a desired pose and a small amount of power to move to new poses. This limits its manipulation skills but lets it gesture and interact safely with people. Its relatively small size means users are not intimidated, and its face is simple, so it is easy to relate to and understand. The first prototype was created in 2004; the researchers designed an improved version in 2006 and 2007. In 2007 and 2008 they built six copies of the new design, which are the robots they use in their studies today.

Specs
- Overview
Capable of exhibiting a wide range of social gestures and facial expressions. Torso can be paired with a wheeled base for mobility.
- Status
Ongoing
- Year
2006
- Website
- Width
- 18 cm
- Height
- 56 cm
- Length
- 40.6 cm
- Weight
- 7.7 kg
- Sensors
Head with two Firewire cameras (eyes). Microsoft Kinect and custom IMUs (depending on use).
- Actuators
12 DC motors, seven servos.
- Degrees of Freedom (DoF)
- 19 (Arm: 7 DoF x 2; Head: 5 DoF)
- Materials
Plastic, aluminum, PCB.
- Compute
Intel Core 2 Duo mini PC
- Software
64-bit Ubuntu OS, ROS (Robot Operating System), custom control software.
- Power
12-V 6-A power supply
- Cost
- $15,000