BigDog

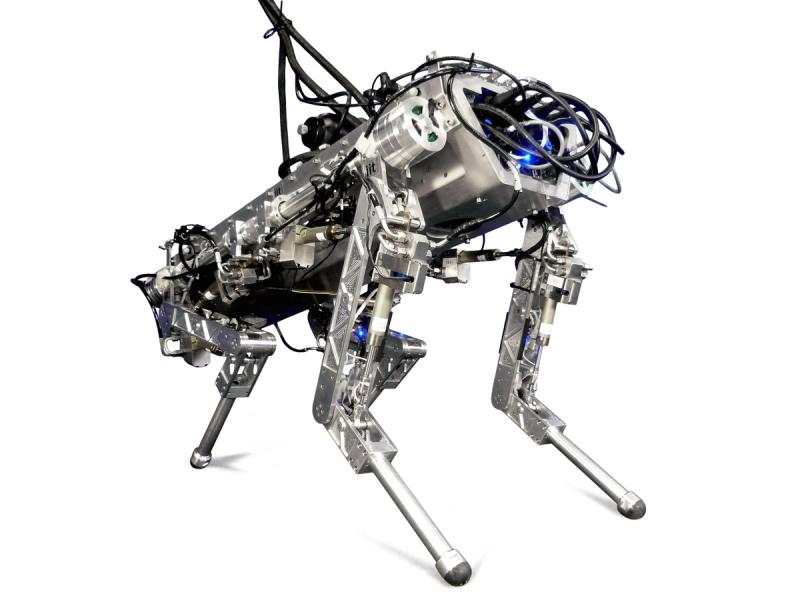
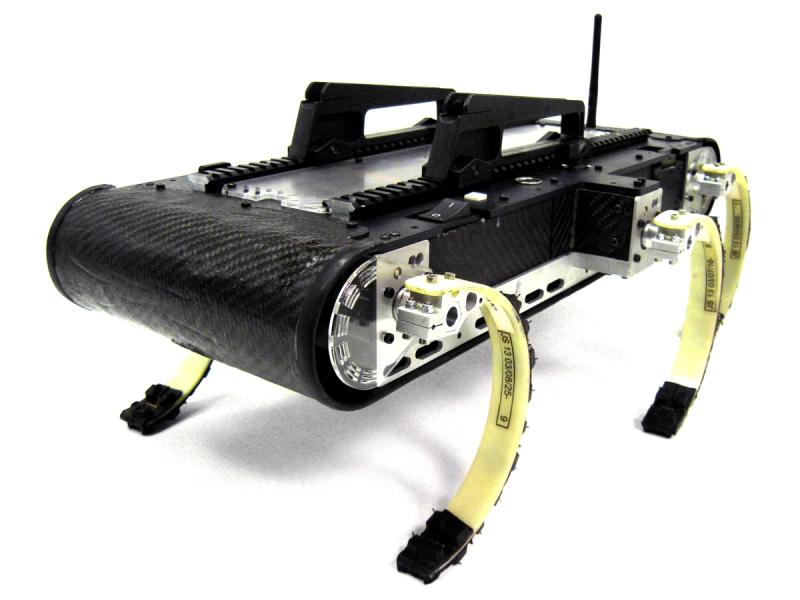
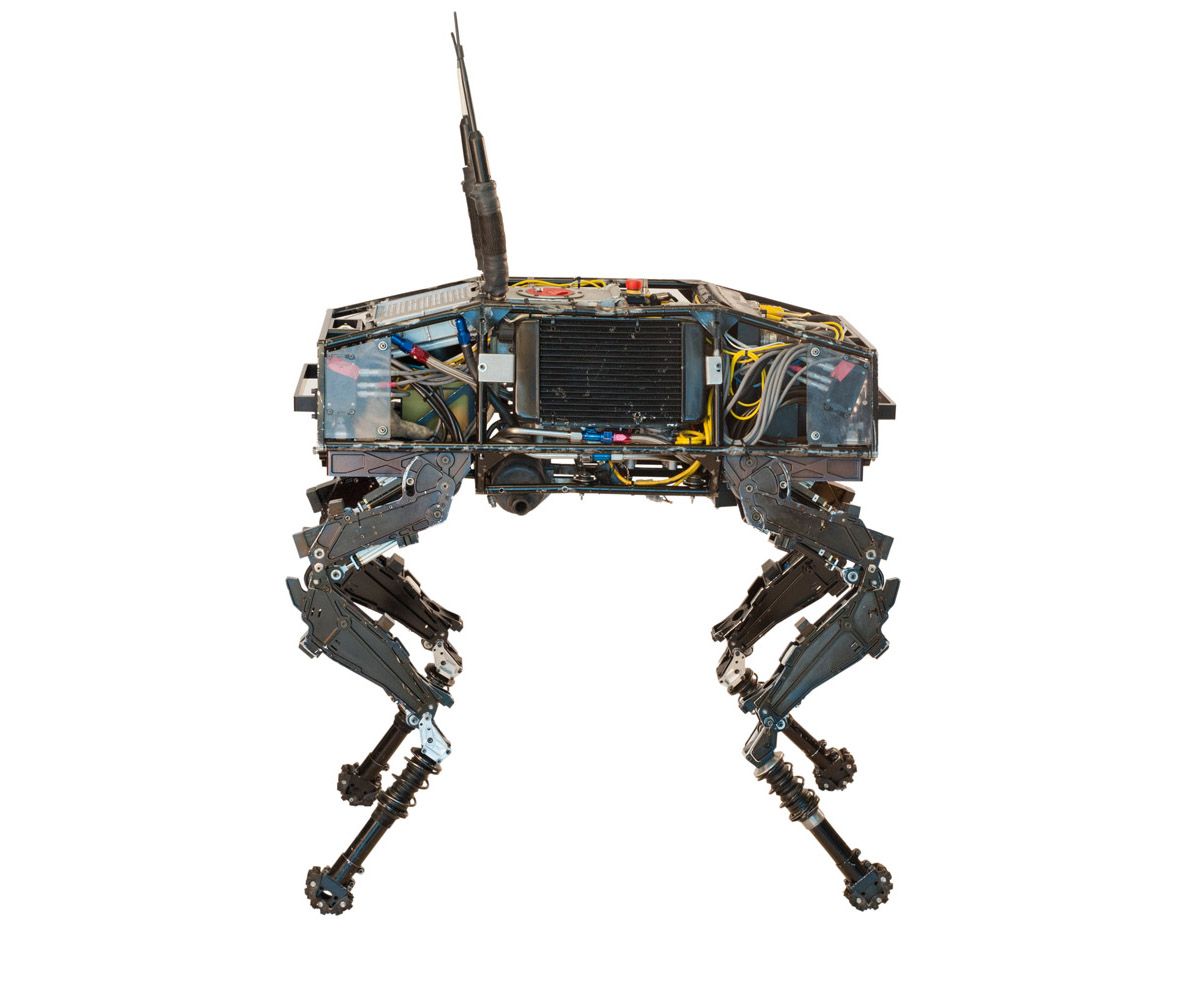
BigDog is a dynamic quadruped robot that walks, runs, and carries heavy loads. It works as a pack mule to assist soldiers in carrying gear. You can even kick it, and this robotic beast won't notice.
- Creator
- Year
- 2005
- Country
- United States 🇺🇸
- Categories
- Features
Did you know?
The engine that powers BigDog was taken from a go-kart.
More videos
Audio

Marc Raibert, founder and CEO of Boston Dynamics, explains the origins of the BigDog project and reveals where the name BigDog came from.
Photo: Jodi Hilton/The New York Times/Redux
Marc Raibert discusses BigDog's transformation into a YouTube sensation.
Image: Boston DynamicsHistory
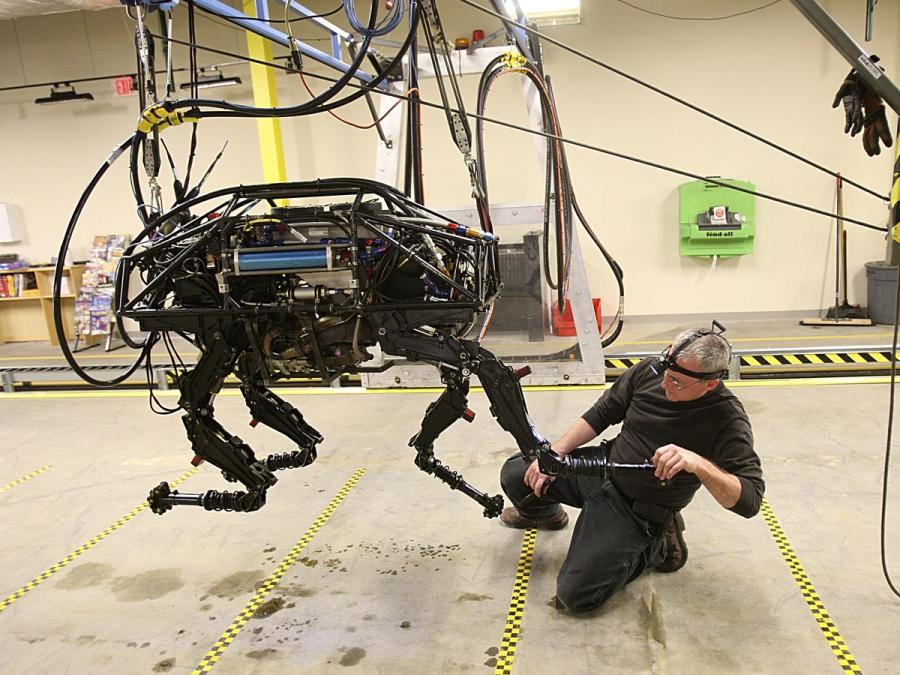
Boston Dynamics, led by Marc Raibert, started developing BigDog in 1995 with funding from DARPA. The robot used many ideas conceived by Raibert at the Leg Laboratory, which originated in 1980 at Carnegie Mellon and moved to MIT in 1986. Researchers from NASA Jet Propulsion Laboratory and Harvard University collaborated on the BigDog project. The goal was to build an unmanned, legged vehicle with rough terrain mobility superior to that of existing wheeled and tracked vehicles. The ideal system would travel anywhere a person or animal could go using their legs, run for many hours at a time, and carry its own fuel and payload. Boston Dynamics built and tested several versions of BigDog, which demonstrated impressive feats of balance and agility. In 2011, the company announced that it was developing a bigger, stronger quadruped, called AlphaDog.
Specs
- Overview
Able to carry payloads of 150 kg (340 lb). Capable of dynamic walking on rubble, mud, snow, water, ice, and slopes up to 35 degrees.
- Status
Inactive
- Year
2005
- Website
- Width
- 30 cm
- Height
- 125 cm
- Length
- 100 cm
- Weight
- 113.4 kg
- Speed
- 11.26 km/h
- Sensors
Legs with joint position and force sensors. Body with gyroscope, LIDAR, and stereo vision system. Hydraulic system with pressure and temperature sensors.
- Actuators
16 custom hydraulic actuators
- Degrees of Freedom (DoF)
- 20 (16 powered, 4 passive)
- Compute
PC/104 board with Pentium 4 class CPU
- Software
QNX real-time OS with custom C++ code for control, sensing, data collection, and communication.
- Power
Hydraulic pump driven by 15-horsepower internal combustion engine.