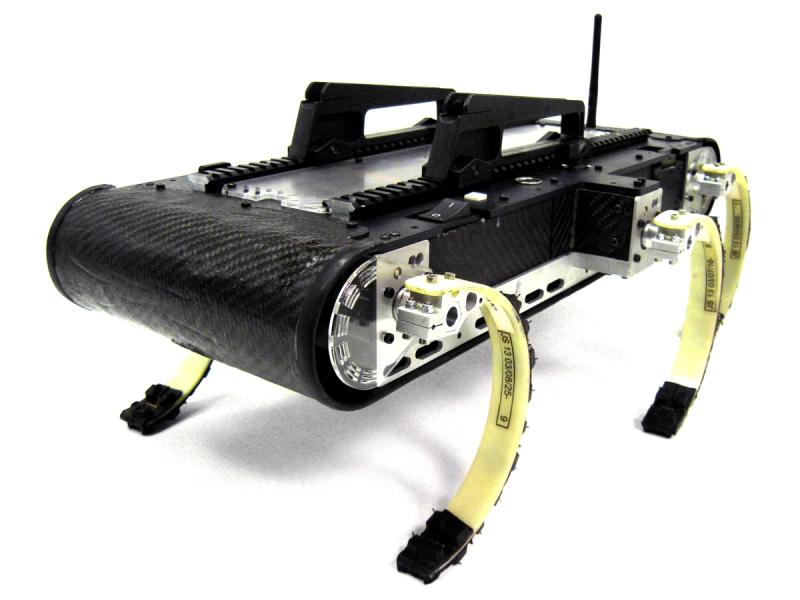
Daisy

Daisy is a hexapod robotics kit designed for researchers interested in robot locomotion and motion control. The system can be easily customized and expanded depending on the needs of each research project.
- Creator
- Year
- 2017
- Country
- United States 🇺🇸
- Categories
- Features
More videos
Did you know?
The first Daisy was built for the Robot Revolution exhibit at the Chicago Museum of Science and Industry.

Specs
- Overview
Modular configuration using HEBI Robotics' X-Series actuators. Force sensing and control on all joints. Series-elastic actuation on all joints.
- Status
Ongoing
- Year
2017
- Website
- Width
- 100 cm
- Height
- 50 cm
- Length
- 100 cm
- Weight
- 18 kg
- Speed
- 1 km/h
- Sensors
Proprioceptive (internal) sensing provided by the joints. Each joint has position, velocity, and torque sensing, as well as an IMU, plus various internal temperatures, current, and voltage sensors.
- Actuators
Twelve X8-9 actuators, and six X8-16 actuators.
- Degrees of Freedom (DoF)
- 18 (Legs: 6 x 3 DoF)
- Materials
Mostly aluminum tubing and machined brackets. 3D-printed wire covers.
- Compute
Intel NUC computer in chassis. ARM Cortex M4 microprocessor in each joint.
- Software
Computer can be configured with Ubuntu or Windows. Kit demo code and full APIs available in C++, ROS, Python, and MATLAB. Each actuator runs ChibiOS for hard real-time motor control and sensor processing.
- Power
Two 98-Wh LiGo batteries from Grin Technologies. Hot-swappable, with 1 to 2 hours of operation.
- Cost
- $85,000