DASH
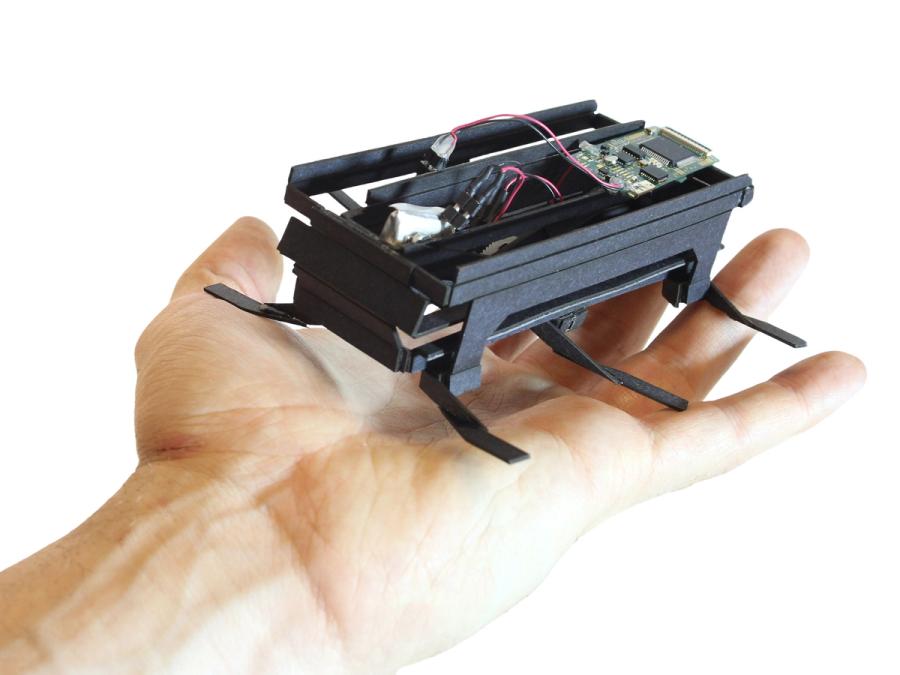
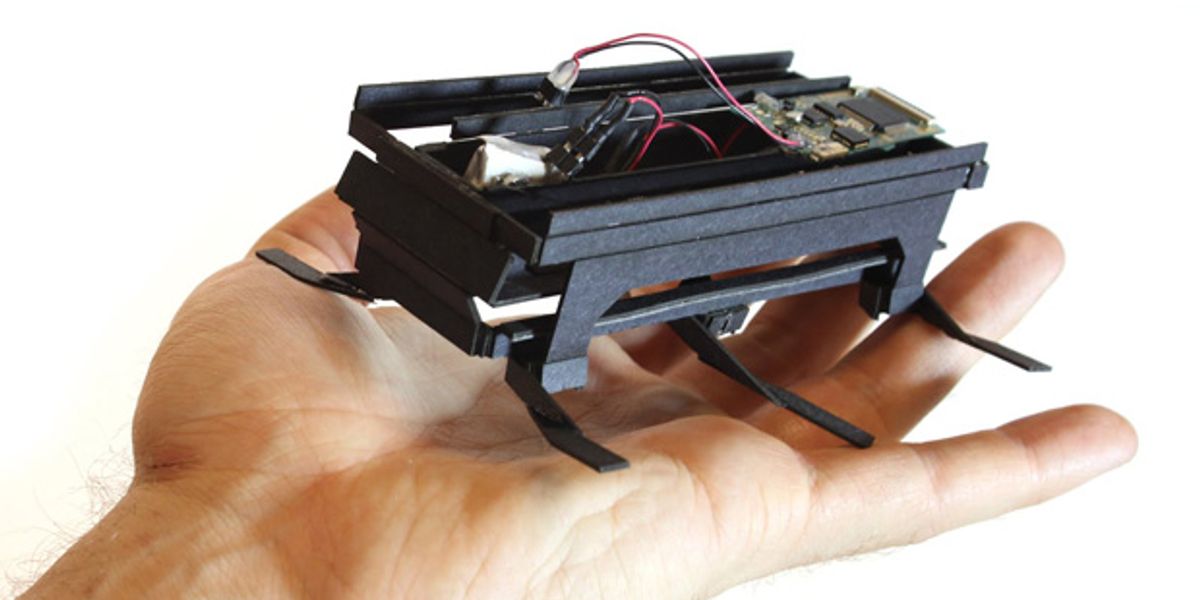
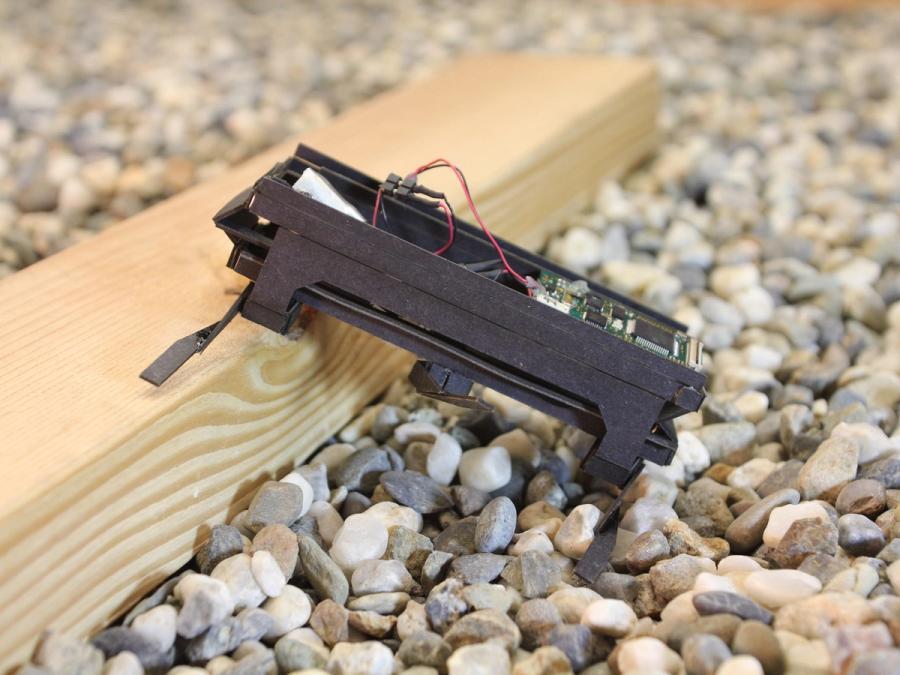
DASH is a little insect-inspired robot designed for search-and-rescue and remote sensing applications. It can run, climb over obstacles, and survive falls from any height (just don't step on it).
- Creator
- Year
- 2009
- Country
- United States 🇺🇸
- Categories
- Features
More videos
Did you know?
DASH stands for "Dynamic Autonomous Sprawled Hexapod."
History
Created by Paul Birkmeyer and Prof. Ronald Fearing at the Biomimetic Millisystems Lab at UC Berkeley, DASH is extremely lightweight and robust, and uses a single DC motor to power the legs and a small servomotor to slightly deform the robot's body, making it turn left or right. DASH went through several dozen revisions until its creators arrived at the final version. This was possible due to the inexpensive materials used and the rapid prototyping manufacturing processes used to make the robot. DASH has since been succeeded by CLASH, a small hexapod that leverages the lessons of DASH to create climbing robotic platform.

Specs
- Overview
Lightweight, inexpensive, and robust design. Capable of running at speeds of 1.5 m/s, or 15 times its own body length per second.
- Status
Inactive
- Year
2009
- Website
- Width
- 10 cm
- Height
- 5 cm
- Length
- 10 cm
- Weight
- 0.016 kg
- Speed
- 5.4 km/h
- Sensors
Three-axis accelerometer, three-axis gyroscope. Cellphone camera optional.
- Actuators
One brushed DC motor (for moving the legs) and one shape-memory-alloy servomotor (for turning).
- Degrees of Freedom (DoF)
- 2
- Materials
Paper composite body with polymer flexure joints.
- Compute
40 MHz microcontroller
- Software
Custom firmware
- Power
3.7-V 50-mAh lithium-polymer battery, 30 minutes to several hours of operation, depending on use.
- Cost
- $100 (approximate cost of parts)