Diego-san
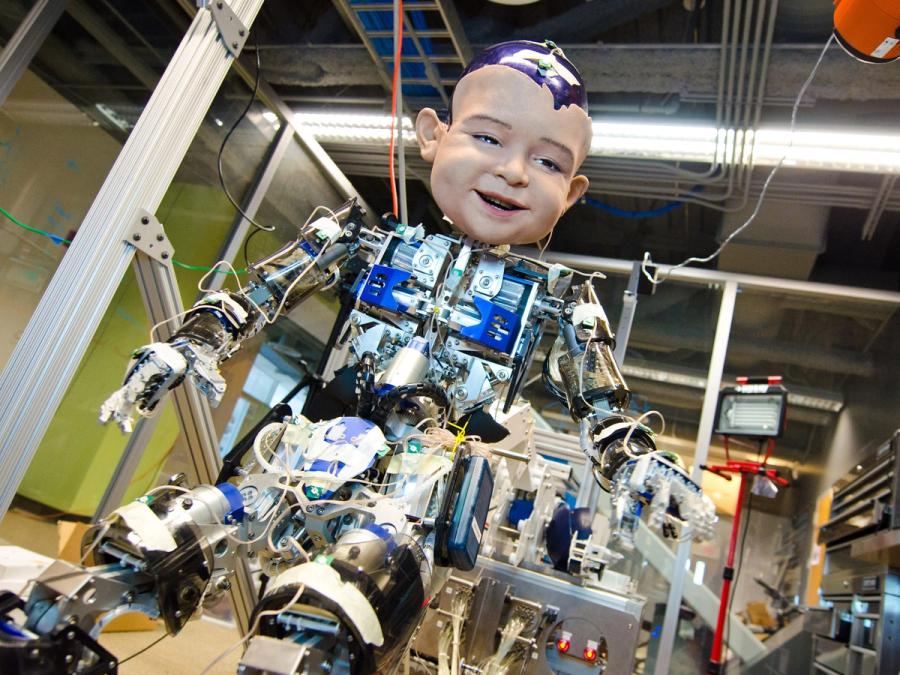
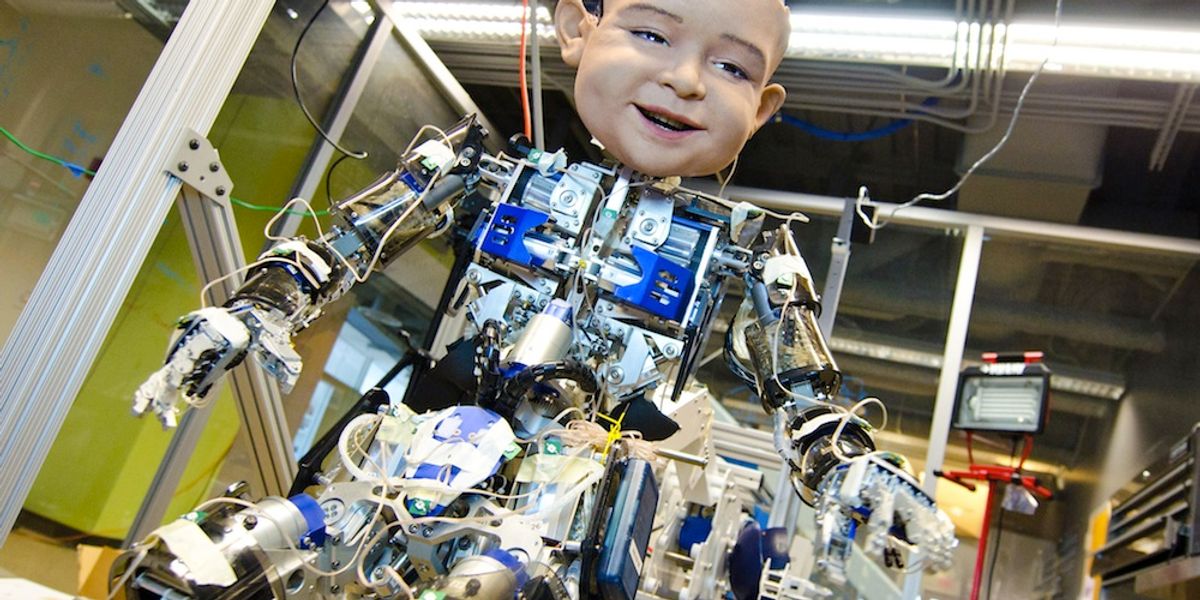
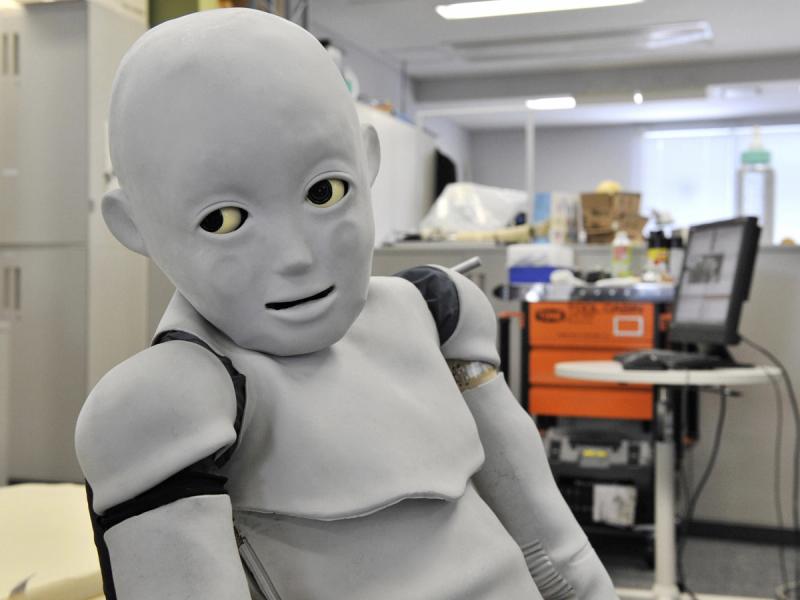
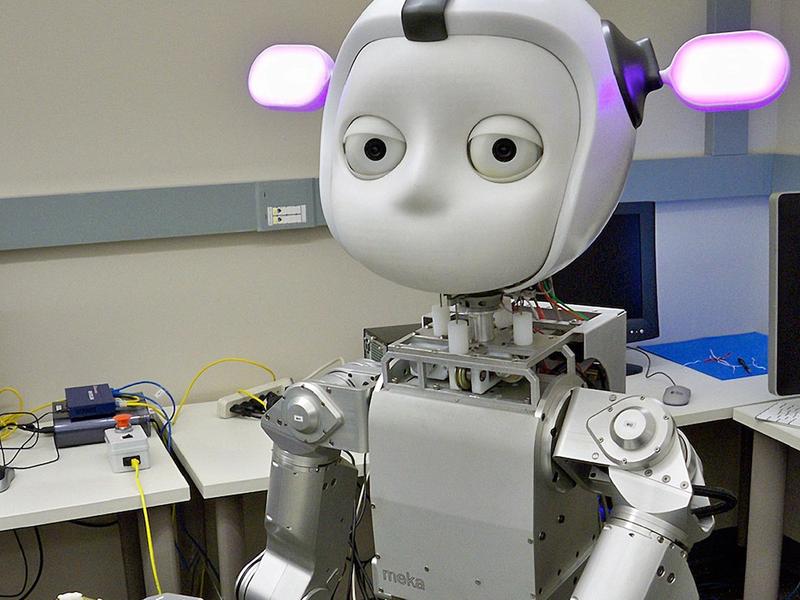
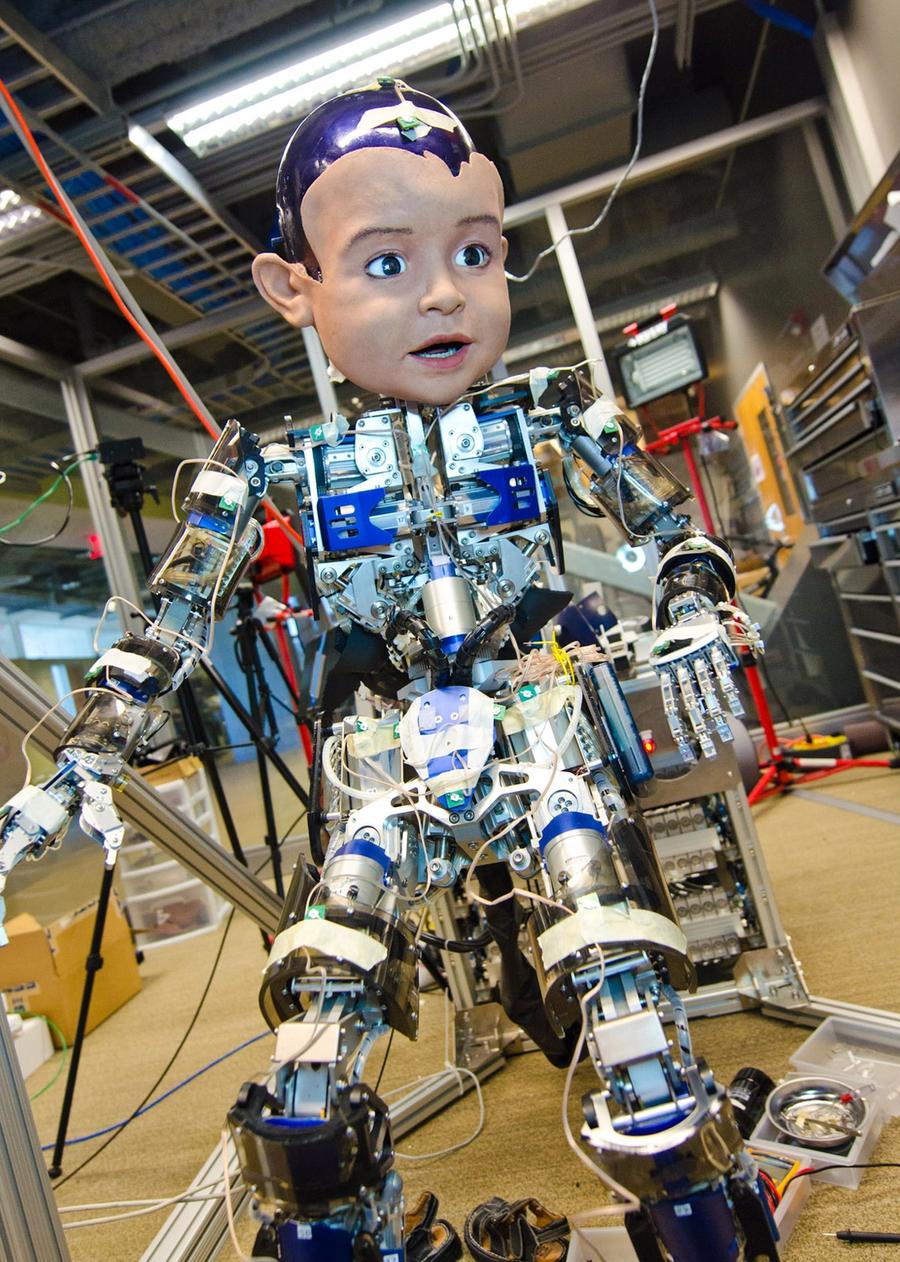
Diego-san is a humanoid designed to study cognitive development. It's modeled after a 1-year-old baby, except it has a giant head to accommodate all the hardware that powers its expressive face.
- Creators
- Year
- 2010
- Country
- United States 🇺🇸
- Categories
More videos
Did you know?
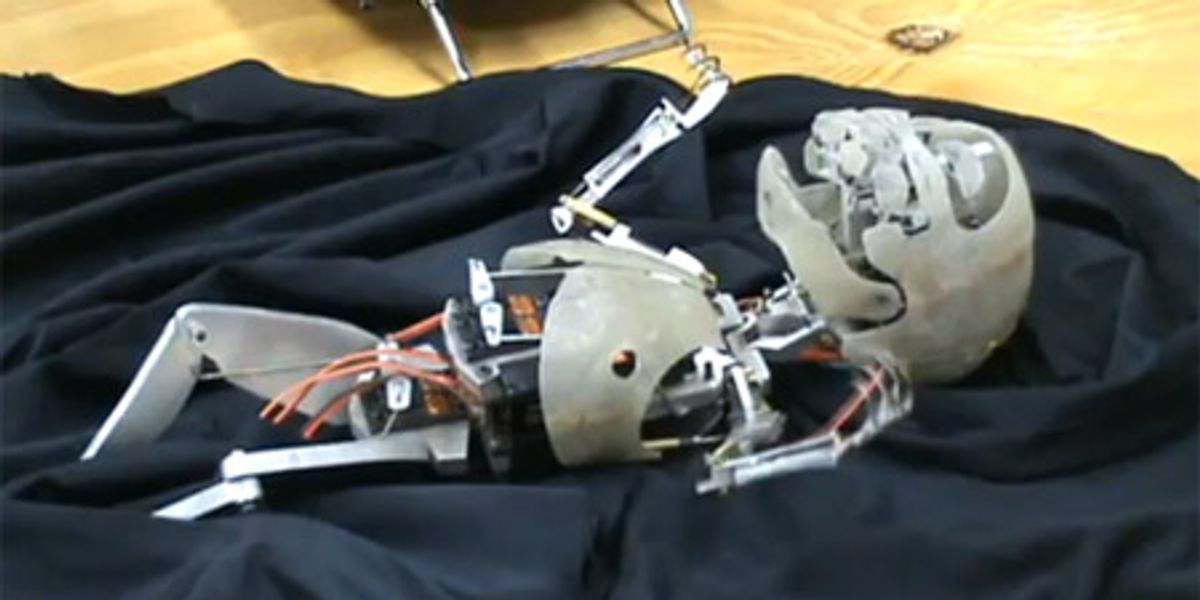
Diego-san uses 27 servo motors to control his expressive face.

History
In 2010, researchers at the Machine Perception Laboratory at UCSD, led by professor Javier Movellan, started developing Diego-san to study cognitive and social development in infants. The humanoid robot is modeled after a 1-year-old baby, with its body built by Japanese animatronic company Kokoro and its head created by Hanson Robotics, a company founded by roboticist David Hanson that specializes in ultra-realistic humanoid robots. The robot was activated in 2013, and it featured high definition cameras in the eyes and 27 servo motors controlling his expressive face.

Specs
- Overview
Equipped with compliant joints driven by agonistic-antagonistic actuators. Capable of controlling the stiffness of each joint.
- Status
Discontinued
- Year
2010
- Website
- Width
- 70 cm
- Height
- 130 cm
- Weight
- 35 kg
- Sensors
Two Point Grey Dragonfly2 cameras, two microphones, two inertial measurement units, 38 potentiometers, 88 pressure sensors.
- Actuators
44 pneumatic actuators for body joints and 18 electric RC servos for the face.
- Degrees of Freedom (DoF)
- 71 (27 electric servos for facial expression and 44 independently controlled pneumatic joints: Head and neck: 4 DoF; Trunk: 4 DoF; Arm: 8 DoF x 2; Hand: 3 DoF x 2; Leg: 7 DoF x 2. Each pneumatic joint has 2 degrees of freedom: position and compliance.)
- Materials
Aluminum structure, acrylic shell, and rubber face.
- Compute
Intel Xeon 2.8 GHz computer with 12 cores. Analog sensors and pneumatic actuators connected to the computer using a National Instruments data acquisition system.
- Software
Ubuntu Linux OS and ROS (Robot Operating System) for sensor and actuator communication. OpenCV for visual perception; Python/Matlab/C++ for control system.
- Power
Compressed air from external compressor.