Herb
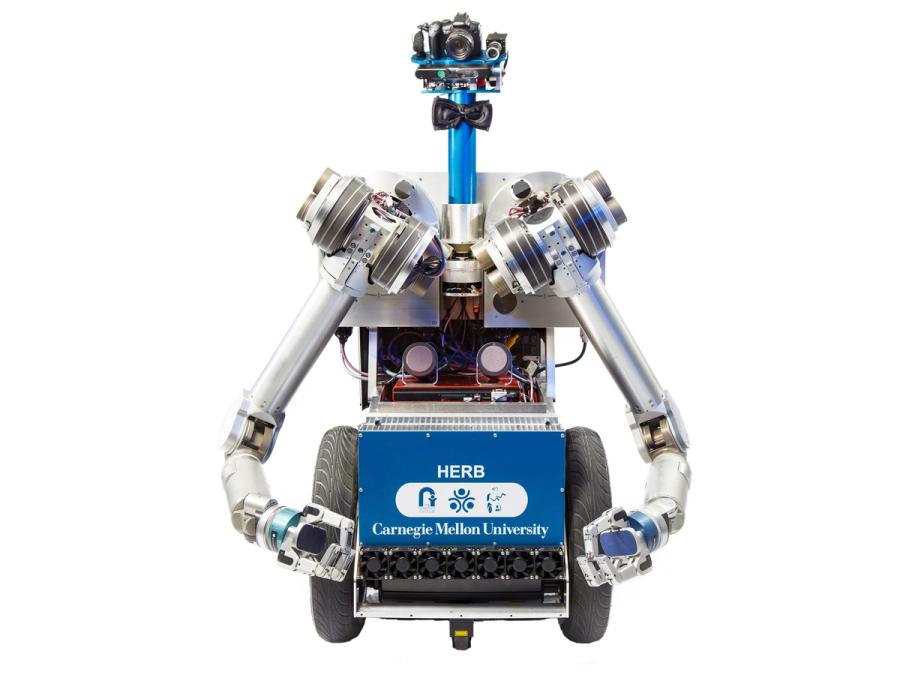
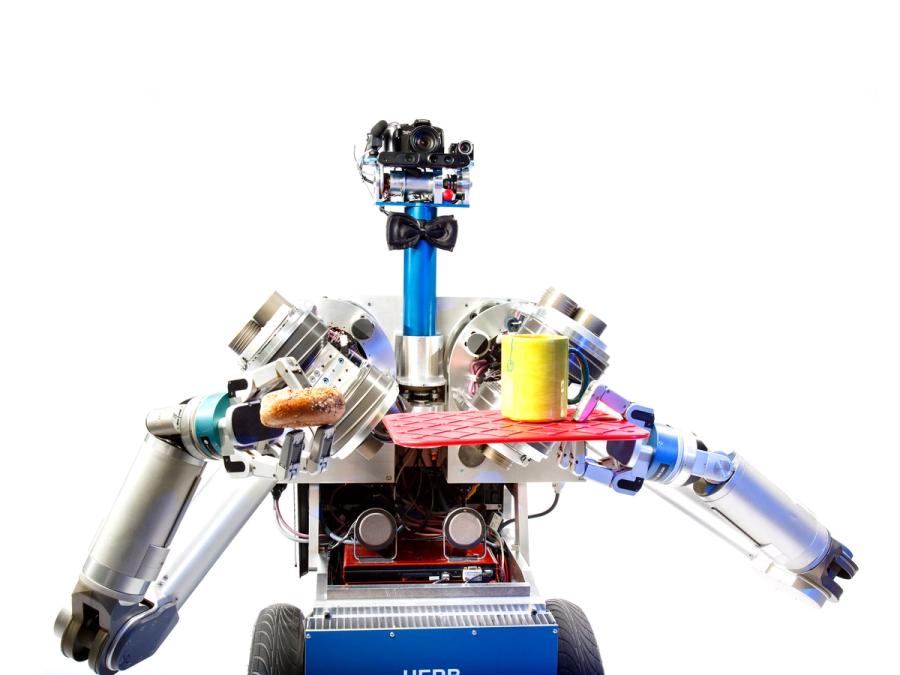
Herb is an autonomous robot with a mobile base and two arms. It's learning to perform tasks in human environments, including the kitchen, where it loves to separate the cookie and cream of his Oreos.
- Creator
(Originally at CMU, the Personal Robotics Lab operates now at the University of Washington in Seattle.)
- Year
- 2006
- Country
- United States 🇺🇸
- Categories
- Features
More videos
Did you know?
Herb stands for Home Exploring Robot Butler, but the name is also a homage to Herbert A. Simon, the AI pioneer and renowned CMU professor.

History
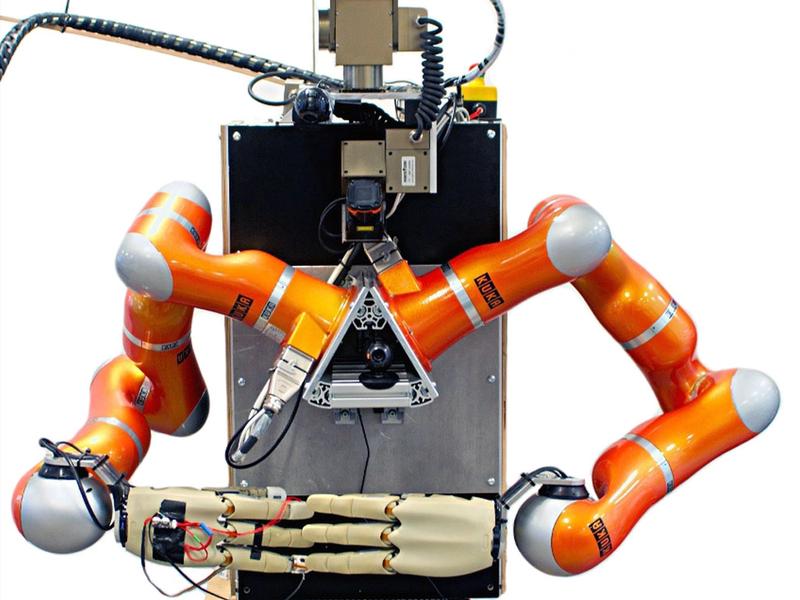
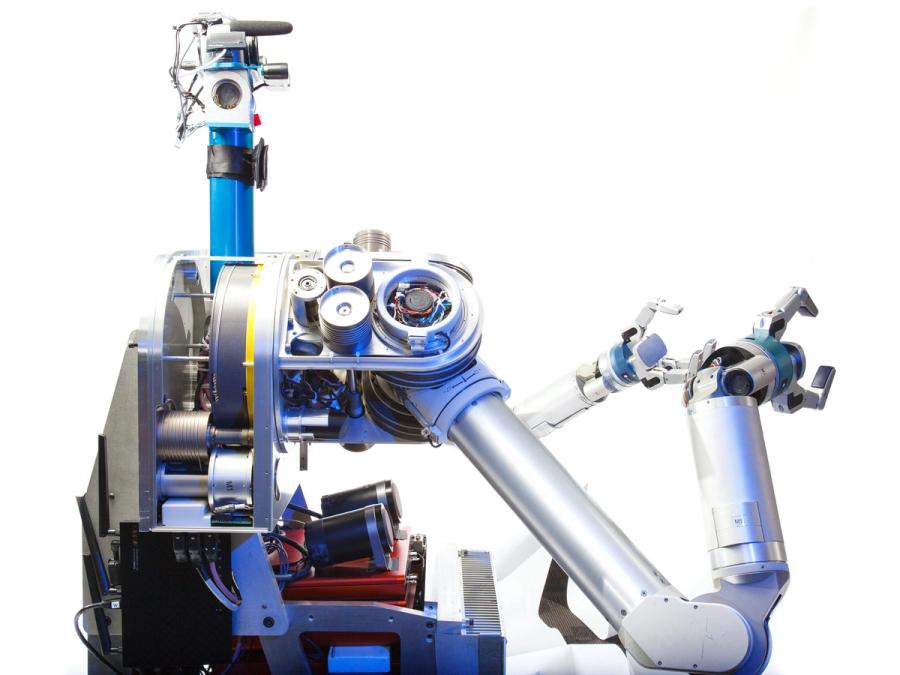
Herb was created by a team led by Siddhartha Srinivasa at Carnegie Mellon, in 2006. Initial funding came from Intel and the Quality of Life Technology Center, a National Science Foundation engineering research center focused on creating intelligent systems that work symbiotically with people in everyday tasks. The first version, called the Busboy, consisted of a wandering Segway RMP 200 mobile base and a single Barrett WAM arm mounted on a pedestal. In 2008, the group built the next version, Herb 1.0, making improvements to the manipulator. In 2010, the researchers redesigned the entire robot from scratch, creating Herb 2.0, with two arms and a head, custom electronics, cooling, and power to last up to six hours untethered. Srinivasa is now a professor at the University of Washington, where he heads the Personal Robotics Lab.

More Images
Specs
- Overview
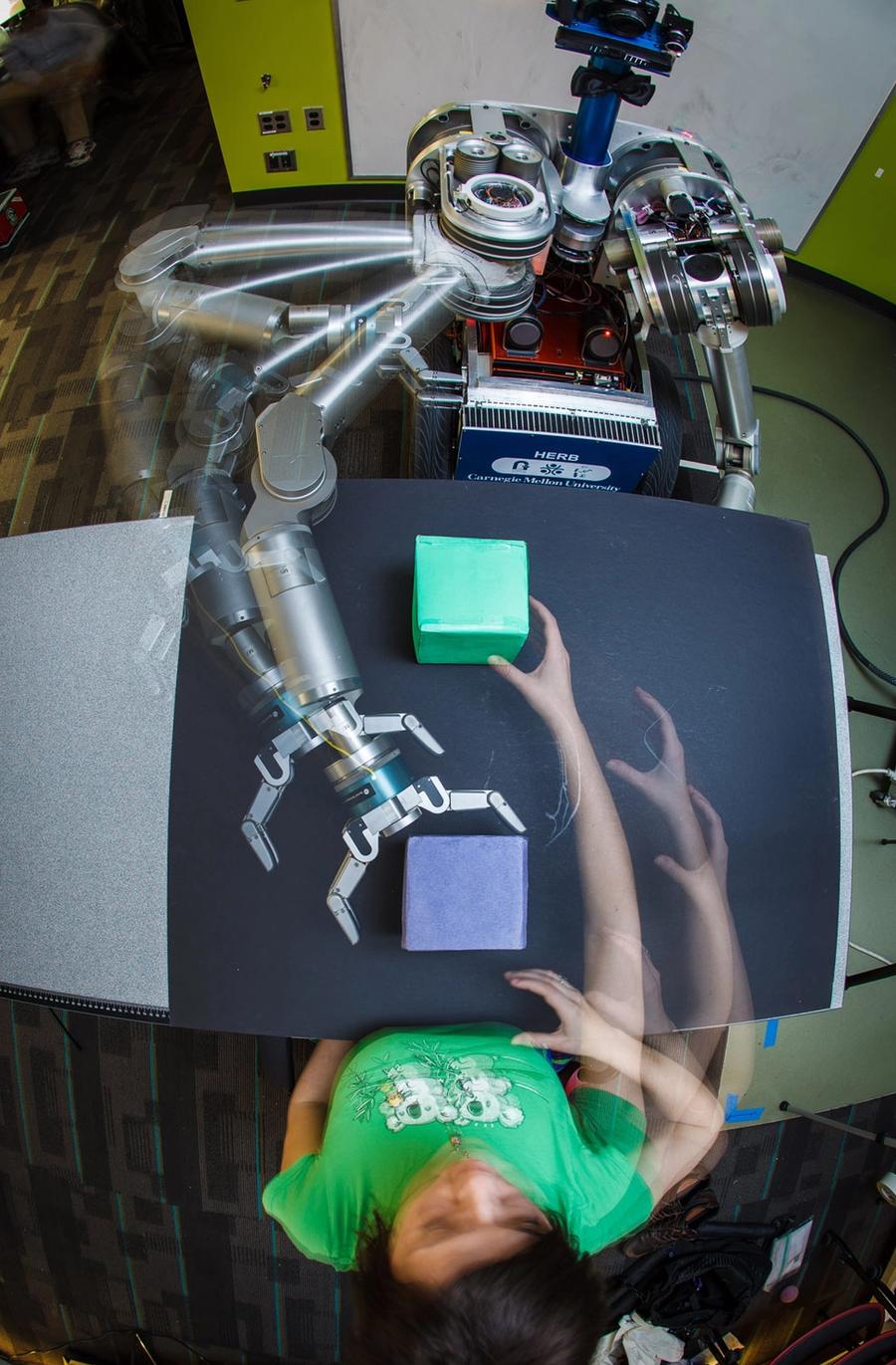
Able to recognize objects and plan safe, smooth motions for collaborative manipulation.
- Status
Ongoing
- Year
2006
- Website
- Width
- 65.5 cm
- Height
- 140 cm
- Length
- 62 cm
- Weight
- 127 kg
- Speed
- 5.4 km/h
- Sensors
SLR camera, high-resolution gigabit-Ethernet monocular camera, RGBD camera, custom spinning 3D laser, infrared navigation system, microphone, tactile pads, force-torque sensors, strain gauges, planar base lasers.
- Actuators
Two 7-DOF Barrett WAM arms, Segway RMP 200 base, custom 2D-OF pan-tilt head.
- Degrees of Freedom (DoF)
- 27 (Head: 2 DoF; Arm: 7 DoF x 2; Hand: 4 DoF x 2; Base: 3 DoF)
- Materials
Custom machined aluminum chassis
- Compute
Three on-board Dell Precision M6500 mobile workstations with 12 GB RAM and 256 GB solid-state drives.
- Software
Linux OS and custom control software with ROS (Robot Operating System) integration.
- Power
Two 56-V 20-Ah lithium-ion batteries for arms, computing, and sensing; additional lithium-ion batteries in Segway base.