HRP-2

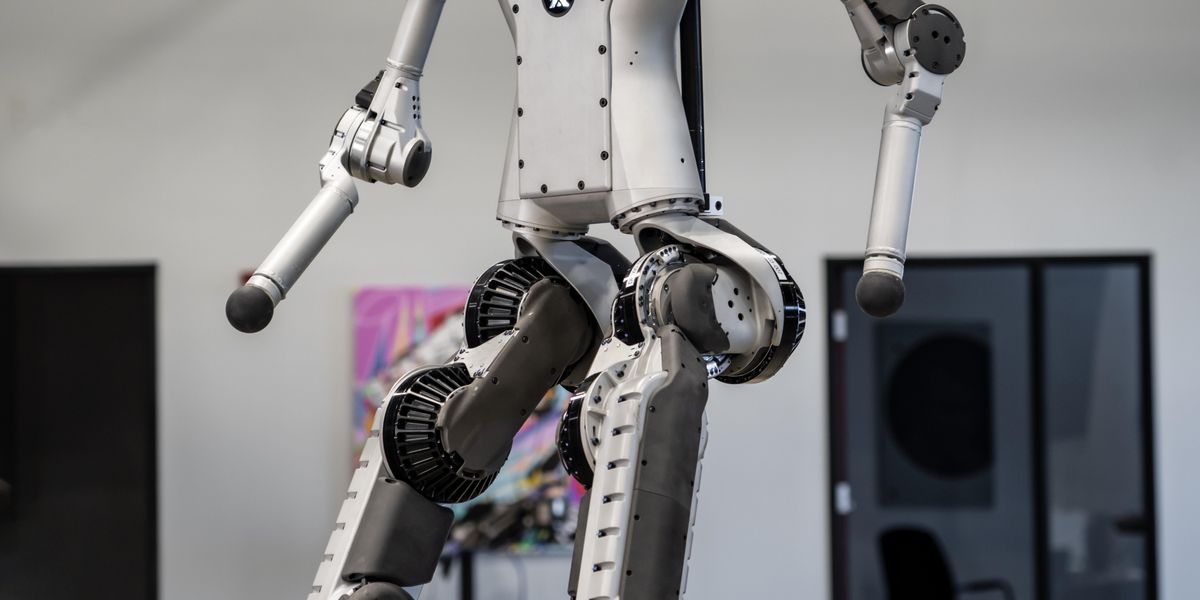
HRP-2 is a popular research humanoid with a deliberately futuristic look. It can cooperate with humans in lifting heavy objects, walk on uneven surfaces, and even get up by itself if it falls over.
More videos
Did you know?
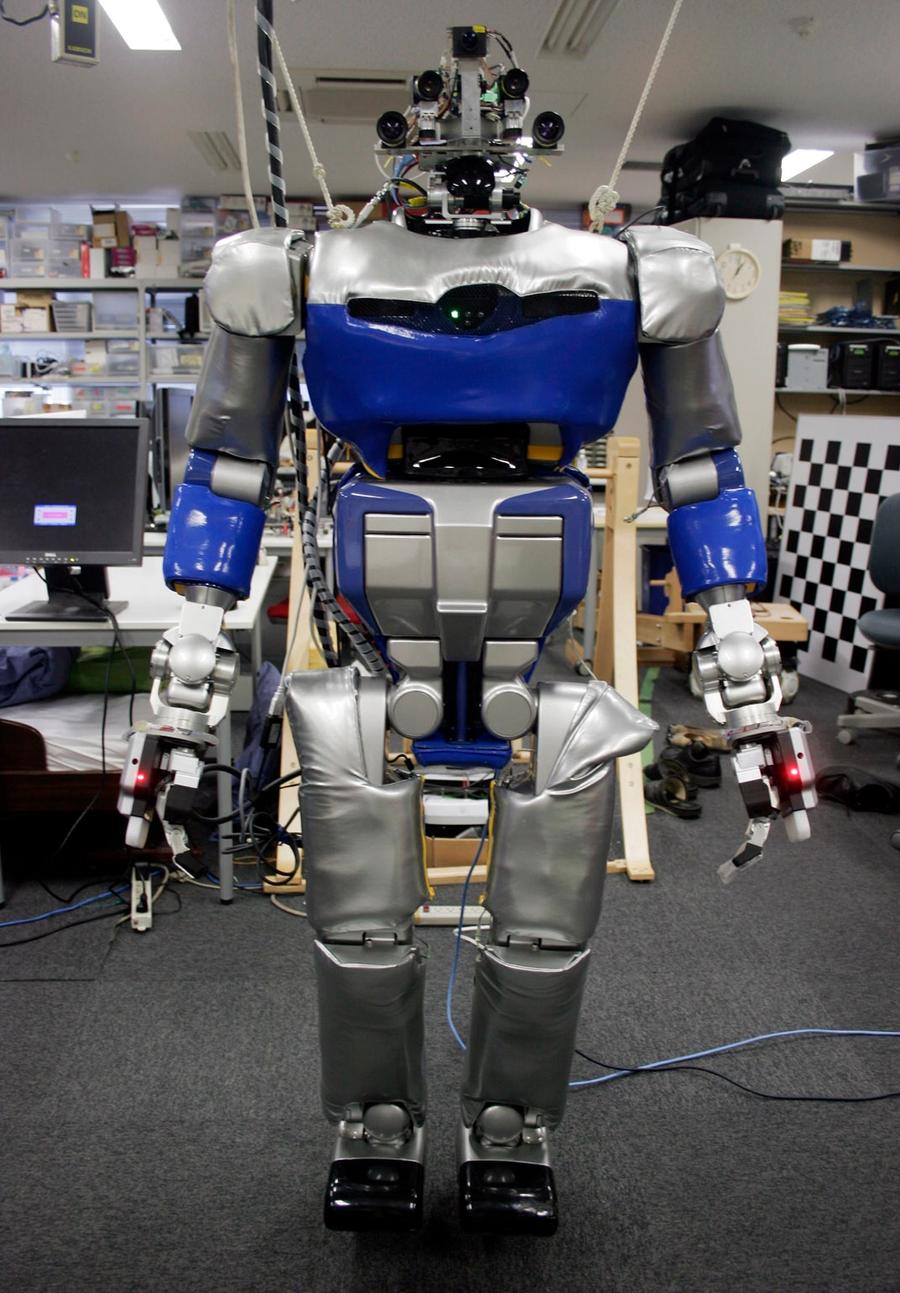
HRP-2's exterior was created by Yutaka Izubuchi, a designer famous for his anime robots.


History
HRP-2 (also known as "Promet") is the second generation in the HRP series of robots, the result of a lasting collaboration between Kawada Industries, led by Tadahiro Kawada, and Japan's National Institute of Advanced Industrial Science and Technology (AIST), headed by Tamotsu Nomakuchi. HRP-2 was announced in 2002 and was followed by HRP-3 in 2006 and HRP-4 in 2010.


More Images

Specs
- Overview
Open architecture and powerful simulation tools. Equipped with a "cantilevered crotch joint" for walking in confined spaces.
- Status
Ongoing
- Year
2002
- Website
- Width
- 65.4 cm
- Height
- 154 cm
- Length
- 33.7 cm
- Weight
- 58 kg
- Speed
- 2 km/h
- Sensors
Three cameras, three-axis gyro, three-axis accelerometer, 30 motor encoders, six-axis force sensors in the arms and legs.
- Actuators
30 DC motors
- Degrees of Freedom (DoF)
- 30 (Head: 2 DoF; Arm: 6 DoF x 2; Hand: 1 DoF x 2; Waist: 2 DoF; Leg: 6 DoF x 2)
- Compute
Two CPU boards
- Software
Linux OS
- Power
48-V 14.8-Ah nickel-metal hydride battery