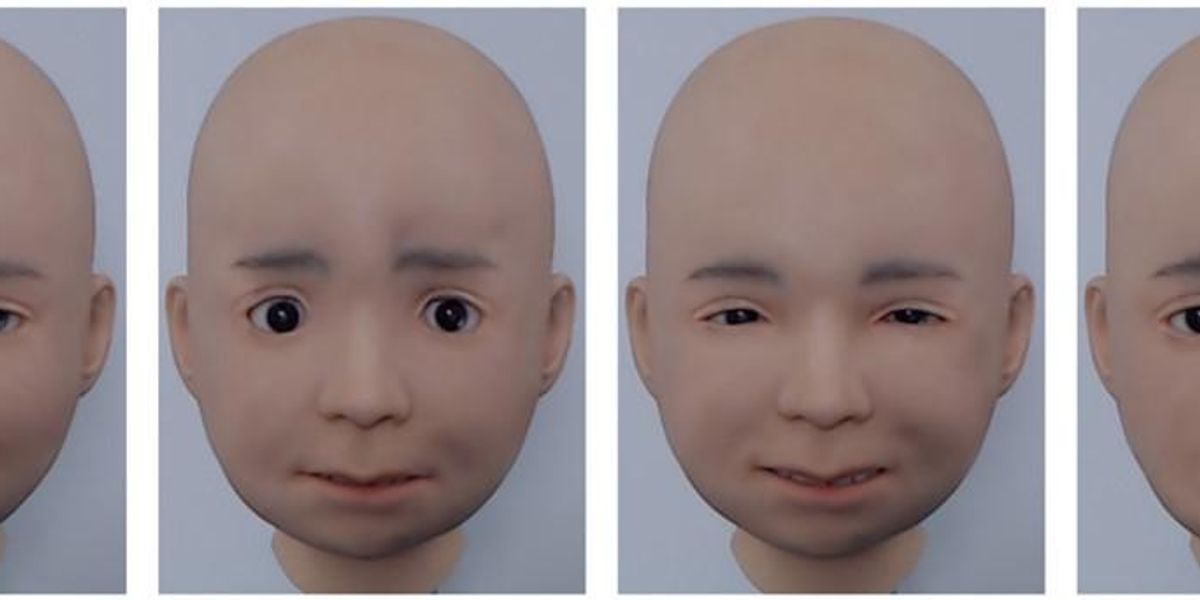
HRP-4C

HRP-4C is an adult-size female android with a realistic head. She can walk, sing, and even dance alongside human performers. Its movements are generated by capturing real people in motion.
Did you know?
HRP-4C is a professional robotic fashion model; her first gig was modeling a wedding dress.


More Images


Specs
- Overview
Able to sing using the vocal synthesizer Vocaloid. Equipped with time-tested walking control technologies developed for the HRP series.
- Status
Ongoing
- Year
2009
- Website
aist.go.jp/sst/en/exhibition/aist_history/history5/index.html
- Height
- 160 cm
- Weight
- 46 kg
- Speed
- 1.8 km/h (walking)
- Sensors
Camera, gyroscope, accelerometer, six-axis force sensor.
- Actuators
44 servomotors
- Degrees of Freedom (DoF)
- 44 (Face: 8 DoF; Head: 3 DoF; Arm: 6 DoF x 2; Hand: 2 DoF x 2; Torso: 3 DoF; Leg: 7 DoF x 2)
- Materials
Silicone rubber skin (face and hands), hard plastic exterior, metal and plastic frame and skeleton.
- Compute
Intel Pentium M 1.6 GHz, wireless network
- Software
Real-time Linux OS with RT-middleware and OpenHRP3 robot simulator.
- Power
48-V nickel-metal hydride battery