Kilobot

Kilobot is a small mobile robot that can operate in groups of dozens to more than 1,000 units. The robots mimic how ants and other insects coordinate their swarm behaviors—but they won't bite you.
- Creator
- Year
- 2011
- Country
- United States 🇺🇸
- Categories
- Features
Did you know?
In early 2012, Harvard researchers completed the assembly of a group of 1,000 Kilobots.

More videos
History
Kilobots were created by researchers at Harvard's Self-Organizing Systems Research Group, led by engineering professor Radhika Nagpal. Her team included Michael Rubenstein, a postdoctoral fellow, and Christian Ahler, a fellow of Harvard's School of Engineering and Applied Sciences and the Wyss Institute. In designing the robots, the researchers looked for inspiration from social insects such as ants and bees. The goal is to use swarms of Kilobots as a test bed for studying collective behavior in natural and artificial systems.
Specs
- Overview
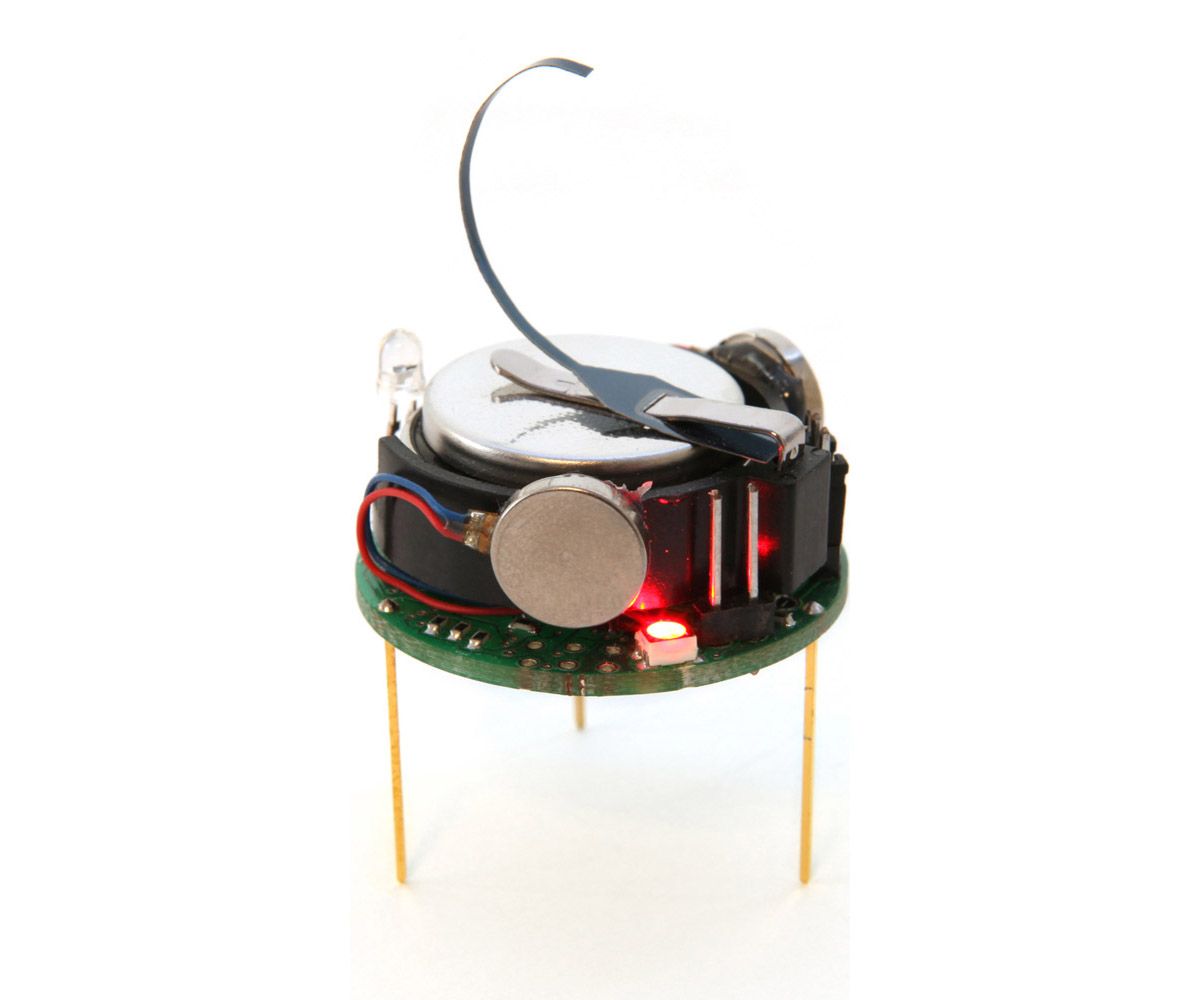
Modular, low-cost design. Able to measure distances to other robots and ambient light. Mobile on flat surfaces using two vibration motors.
- Status
Ongoing
- Year
2011
- Website
- Width
- 3.3 cm
- Height
- 5.5 cm
- Length
- 3.3 cm
- Weight
- 0.016 kg
- Speed
- 0.04 km/h
- Sensors
Infrared sensor (for communicating and measuring distance to other robots) and light sensor (for measuring amount of ambient light on robot).
- Actuators
Two vibration motors
- Degrees of Freedom (DoF)
- 2
- Materials
Body of robot is a printed circuit board with three metal pins for legs.
- Compute
ATmega 328 microprocessor
- Software
Custom embedded software, written in C.
- Power
Lithium-ion battery
- Cost
- $14