M1
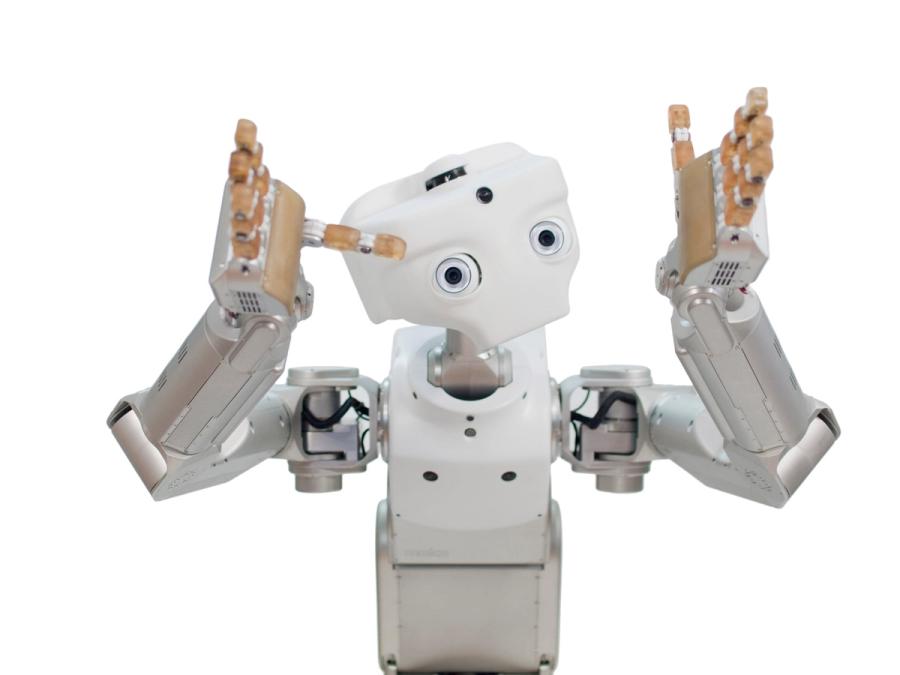
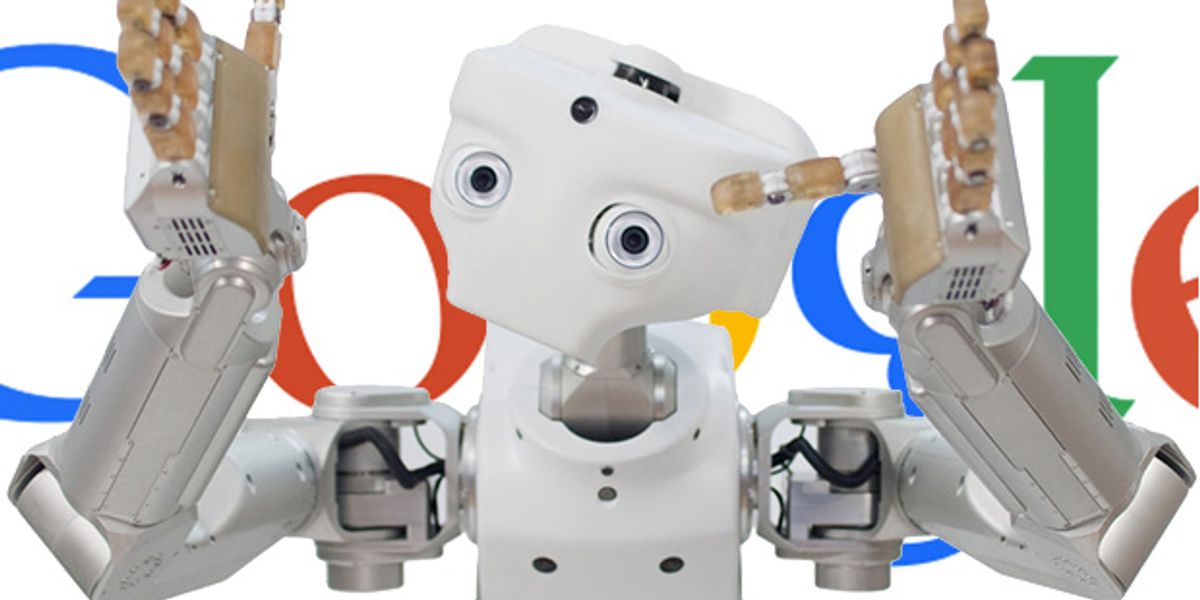
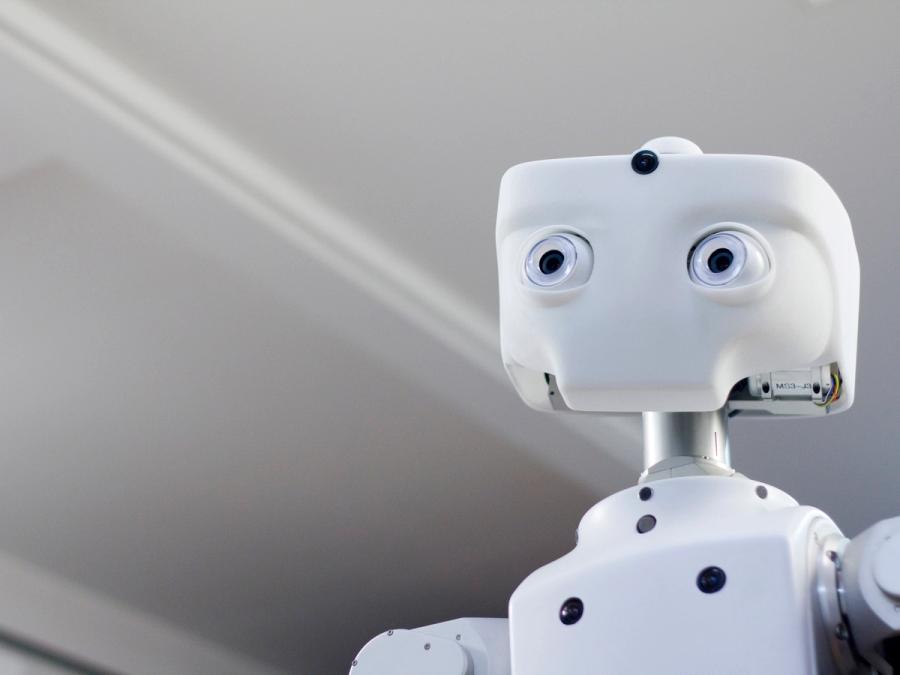
The Meka M1 is a mobile manipulation platform designed to help and collaborate with humans. It includes a wheeled base, a torso, an expressive head, and compliant arms with dexterous hands.
- Creator
- Year
- 2011
- Country
- United States 🇺🇸
- Categories
- Features
More videos
Did you know?
The design of the M1 was inspired by Cody, a research robot from Georgia Tech.

More Images


Specs
- Overview
Equipped with series elastic actuator arms and hands (with torque control at each joint) and a holonomic mobile base.
- Status
Inactive
- Year
2011
- Website
- Width
- 46 cm
- Height
- 160 cm
- Length
- 67 cm
- Weight
- 165 kg
- Speed
- 3.6 km/h
- Sensors
High-resolution camera and 3D camera in the head, joint torque and angle sensors. Additional sensor suite optional.
- Actuators
Series elastic actuators
- Degrees of Freedom (DoF)
- 33 (Arm: 7 DoF x 2; Hand: 5 DoF x 2; Head: 9 DoF)
- Materials
Machined aluminum and sheet metal.
- Compute
Three 2.5 GHz Intel Core2 Duo
- Software
Ubuntu Linux OS, ROS, and RTAI+Meka M3 for real-time operation.
- Power
24-V 60-Ah battery, 1 hour of operation
- Cost
- $320,000 (depending on configuration)