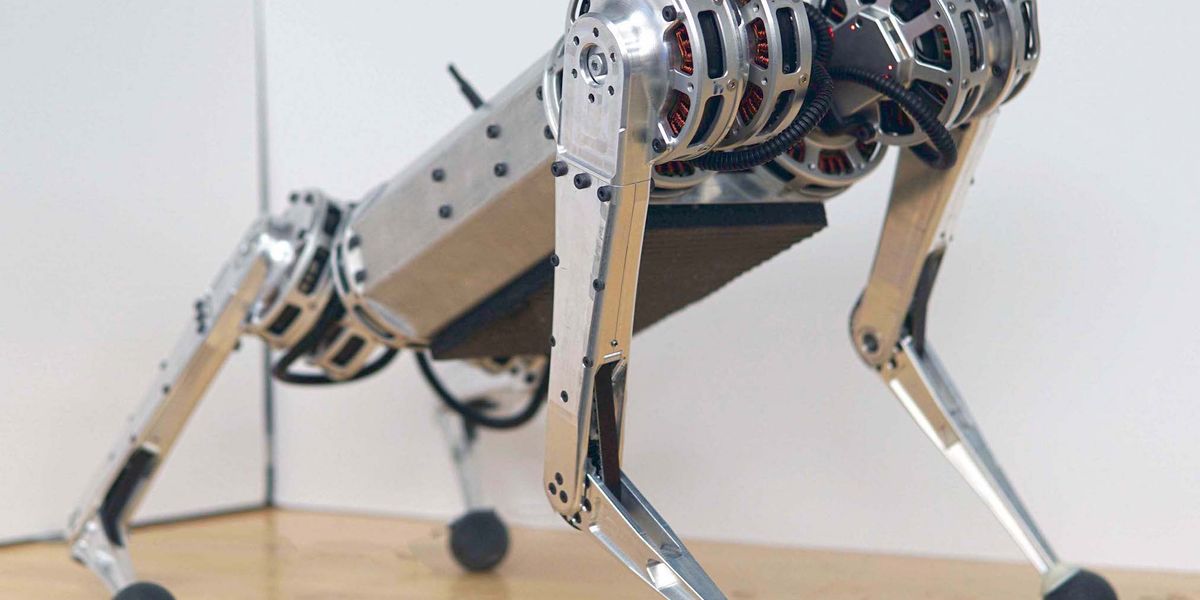
Mini Cheetah
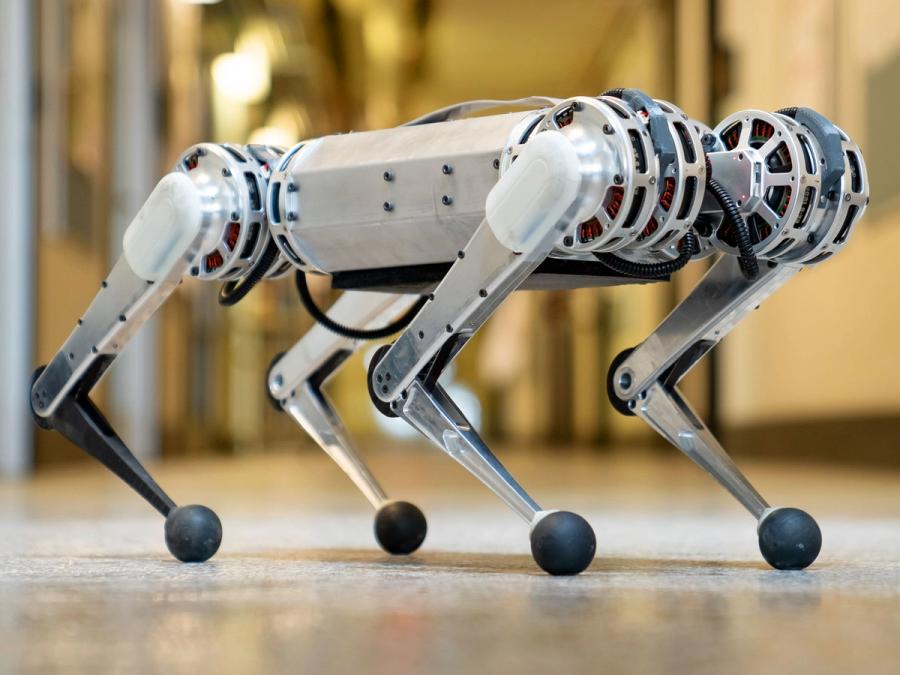
Mini Cheetah is a small, agile four-legged robot that can run and do backflips. It is robust and has powerful actuators, allowing researchers to perform experiments and test new controllers without fear of breaking the robot.
- Creator
- Year
- 2018
- Country
- United States 🇺🇸
- Categories
- Features
More videos
Did you know?
Mini Cheetah is the first quadruped robot to do a 360-degree backflip.
History
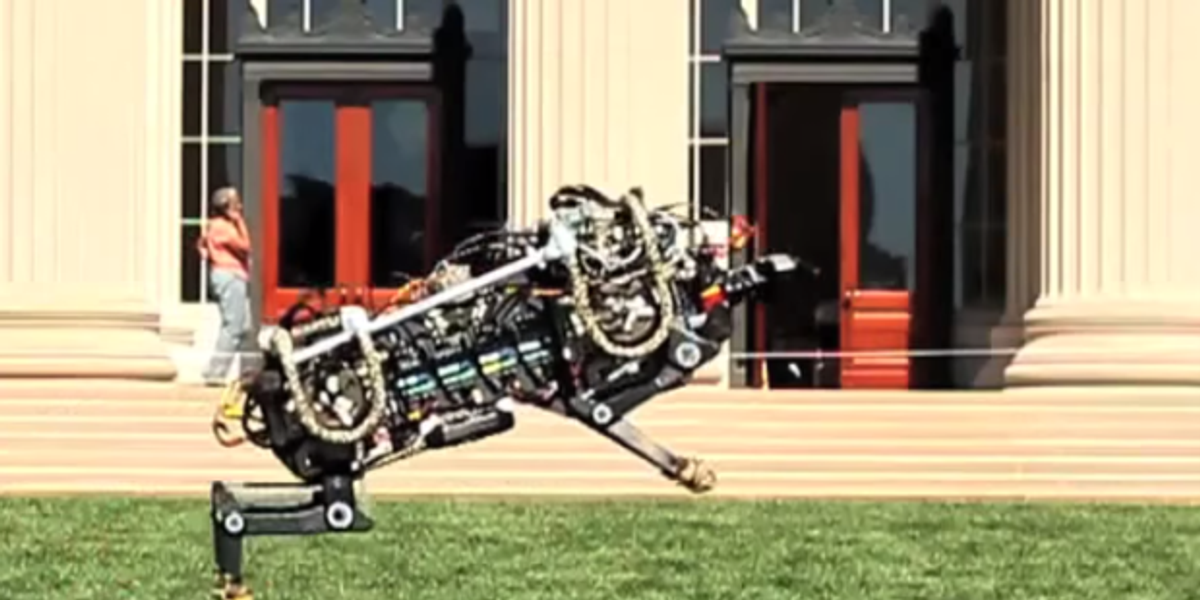
Mini Cheetah was designed by a team led by Sangbae Kim, director of the Biomimetic Robotics Laboratory and a Professor of Mechanical Engineering at MIT. Kim has long been studying dynamic legged locomotion in humanoid robots and quadruped robots. In 2009, his lab unveiled the MIT Cheetah, and in 2013 an upgraded model was shown to run with energy efficiency that could rival that of real running animals. In 2019, they introduced a smaller quadruped, Mini Cheetah, capable of running, jumping, and even doing backflips. The plan was to build a pack of Mini Cheetahs to be used by researchers around the world.
Specs
- Overview
Mechanically robust design that can survive high-impact falls and accidents. Large range of motion at each joint allows operation forwards, backwards, or upside-down. High speed, high torque actuators let the robot perform extremely dynamic maneuvers like backflips. Omnidirectional movement with trotting, pronking, bounding, and pacing gaits, plus in-place turning at 5 radians/second.
- Status
Ongoing
- Year
2018
- Website
- Width
- 27 cm
- Height
- 30 cm
- Length
- 48 cm
- Weight
- 9 kg
- Speed
- 8.8 km/h (forwards), 3.6 km/h (sideways)
- Sensors
Vectornav VN-100 IMU, hall-effect encoders at each motor
- Actuators
Custom modular, low-gear ratio, backdriveable actuators with integrated electronics and high-bandwidth torque control
- Degrees of Freedom (DoF)
- 18 (3 actuated DoF per leg; 6 non-actuated DoF)
- Materials
Aluminum, plastic protectors
- Compute
UP Board with quad-core Intel Atom processor for locomotion control. ST Microelectronics STM32F4 microcontroller in each actuator for joint-level control at 40 kHz
- Software
Linux with CONFIG PREEMPT RT patch
- Power
120-Wh lithium-ion battery for 30 minutes to 2 hours operation, depending on tasks