Salamandra robotica II

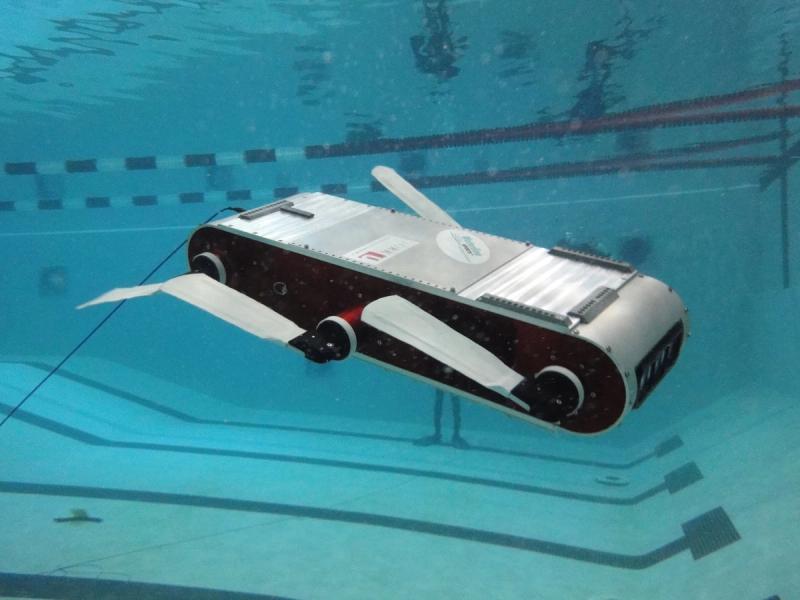
Salamandra robotica II is an amphibious robot inspired by the salamander's anatomy and nervous system. It's used to study robot locomotion and test neurobiological models in real environments.
- Creator
- Year
- 2012
- Country
- Switzerland 🇨🇭
- Categories
- Features
More videos
Did you know?
The robot will keep moving even if you cut it into two or more parts.

History
The first incarnation of the Salamandra robotica, created at EPFL Biorobotics Laboratory led by Prof. Auke Ijspeert, was a proof-of-concept design built with some modules from another robot called AmphiBot, in addition to some rudimentary leg modules. After that, the robot received major upgrades, and the EPFL team used the new design, the Salamandra robotica I, in several experiments. In 2013, the researchers unveiled Salamandra robotica II, which has more degrees of freedom (leg modules are not rigidly fixed to the body) and can walk and swim faster and more nimbly. They've since built more advanced salamander-like robots that can accurately capture the degrees of freedom, range of motion, and gait behaviors of the real animal.


Specs
- Overview
Control system uses a mathematical model of the salamander's spinal cord. Able to move on land or in water and transition between environments.
- Status
Ongoing
- Year
2012
- Website
- Length
- 110 cm
- Weight
- 2.5 kg
- Speed
- 1.9 km/h (walking or swimming)
- Sensors
Rotary encoders for motors. Head with infrared sensor.
- Actuators
12 2.83-watt Faulhaber DC motors with custom plastic gearbox.
- Degrees of Freedom (DoF)
- 12 (Body: 8 DoF; Limbs: 4 DoF)
- Materials
Polyurethane resin
- Compute
ARM-based LPC2129 32-bit 60-MHz main microcontroller; 868 MHz bidirectional radio link for control; eight PIC18F2580 microcontrollers for low-level functions; 12 PIC16F876A as controllers for the motors.
- Software
Custom software written in C.
- Power
Seven 600-mAh and two 1200-mAh lithium-ion batteries.