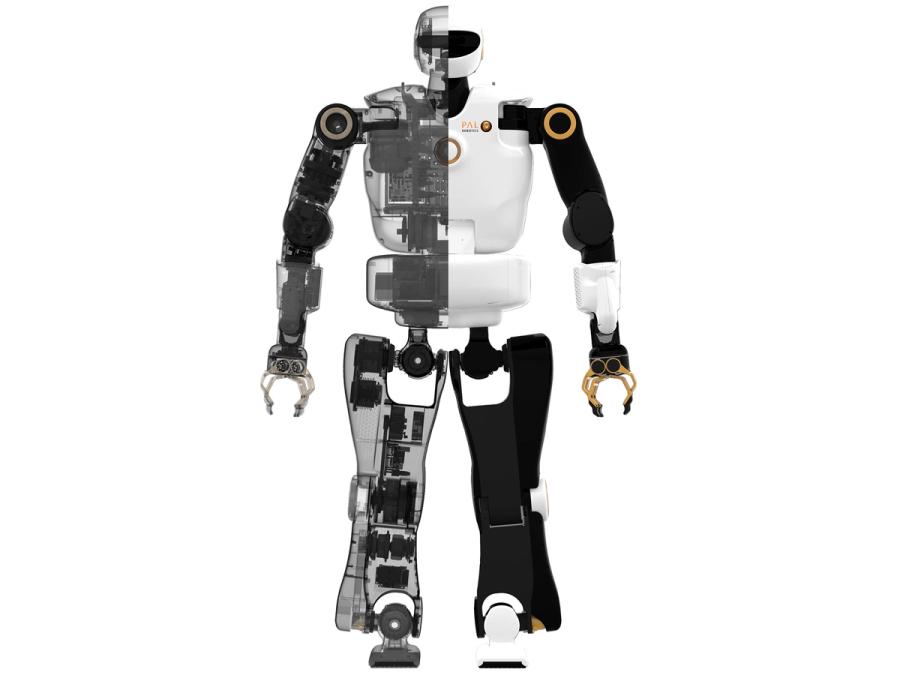
TALOS

TALOS is an advanced humanoid designed to perform complex tasks in research and industrial settings. It uses torque control to move its limbs and can walk on uneven terrain, sense its environment, and operate power tools.
- Creator
- Year
- 2017
- Country
- Spain 🇪🇸
- Categories
- Features
More videos
Did you know?
TALOS is named after the giant automaton protecting the island of Crete in Greek mythology.


More Images

Specs
- Overview
Torque sensors in all joints. Fully electrical. Capable of lifting 6-kilogram payloads per arm. Full EtherCAT communications. ROS-enabled. Dynamic walking, including on uneven ground and stairs. Can complete tasks such as drilling or screwing. Human-robot interaction skills.
- Status
Ongoing
- Year
2017
- Website
- Height
- 175 cm
- Weight
- 95 kg
- Speed
- 3 km/h
- Sensors
Torque sensor feedback in every joint. Inertial measurement unit (IMU). RGB-D camera. Expansion modules for new sensors.
- Actuators
32 high-torque brushless DC motors
- Degrees of Freedom (DoF)
- 32 (Leg: 6 DoF x 2; Arm 7 DoF x 2; Gripper: 1 DoF x 2; Waist: 2 DoF; Neck: 2 DoF)
- Compute
Two Intel Core i7 CPUs
- Software
Ubuntu Linux OS, ROS LTS, OROCOS, Gazebo simulation and URDF model, Real-time ros_control loop at +1 kHz, MoveIt!
- Power
1080-Wh lithium-ion battery, 1.5 hours of operation walking, 3 hours of operation on standby
- Cost
- €900,000 (approximately)







