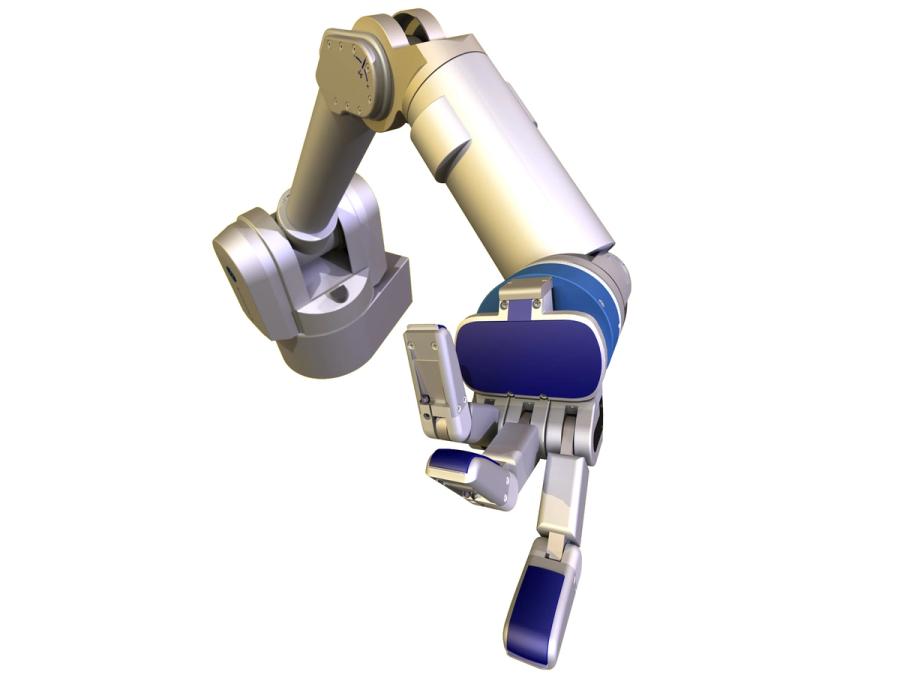
WAM

The WAM is a robot arm designed to achieve human-like dexterity and work safely around people. It has a wide range of motion, backdrivable actuators, and a hand that can grasp almost anything.
- Creators
- Year
- 2004
- Country
- United States 🇺🇸
- Categories
- Features
More videos
Did you know?
WAM stands for whole-arm manipulator.

Specs
- Overview
Open hardware and software architecture. Equipped with force control system based on current sensing (no reliance on mechanical sensors).
- Status
Ongoing
- Year
2004
- Website
- Width
- 34 cm
- Height
- 42 cm (arm folded)
- Length
- 72 cm
- Weight
- 27 kg
- Sensors
Motor shaft angle sensors, torque sensors (via on-board current).
- Actuators
Brushless servomotors. Speed reduction via non-contacting pulleys and stainless steel cables.
- Degrees of Freedom (DoF)
- 30
- Materials
Aircraft-grade aluminum for the main structure, steel, titanium, magnesium, carbon composites, and high tensile, low-mass steel cables.
- Compute
One PC/104 and eight 32-bit 80 MHz DSPs distributed inside the arm.
- Software
Control code in C++. Fully compatible with ROS.
- Power
16-V to 100-V power supply
- Cost
- $99,000 for turn-key arm; $49,000 for modular wrist; $29,000 for basic hand; $4,000,000 total development cost.